
Point
The researchers have developed a small-sized, light-weight, battery-drive, X-ray non-destructive inspection apparatus that has enough ability for inspection, and can be mounted on a movable robot.
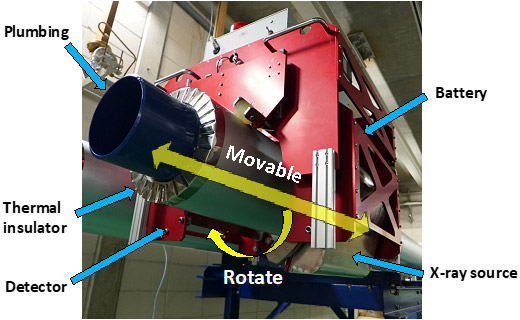
Figure 1. X-ray source unit mounted on a plumbing inspection robot |
|

Figure 2. X-ray transmission image of lead—letters through steel plates (5cm thick)
|
New Results
The developed X-ray non-destructive inspection apparatus mainly consists of a compact, high-energy X-ray source using a carbon nanostructure for an electron emitter, and a highly sensitive X-ray detector. The apparatus is capable of taking an X-ray transmission image through a 5-cm thick steel plate with one 0.1-second X-ray pulse, and also has enough ability of taking an X-ray transmission image of a reduction in thickness of 6-inch plumbing with multiple X-ray pulses. In addition, the system does not require to be plugged into power supply and all the components in the apparatus can be driven by a small-sized light-weight battery. As a result, efficient, non-destructive inspections can be performed with a remote-controlled infrastructure X-ray inspection robot.
Background
In recent years, aging infrastructures have become social issue. X-ray non-destructive inspection is a powerful technique to inspect infrastructures. However, in order to inspect efficiently using a robot, a small-sized and light-weight X-ray inspection system which is mountable on a robot, and at the same time, the X-ray inspection system is desired to have enough ability for industrial use.
Future Plans and Applicability
In the future, the researchers will perform demonstrative experiments, such as a chemical plant piping inspection, as well as examinations of applications to non-destructive infrastructure inspection, thus will contribute to achievement of a safe and secure society by reducing accident frequency due to aging.
Contact
 |
|
 |
|
 |
|
Research Institute for Measurement and Analytical Instrumentation
Ryouichi Suzuki, Prime Senior Researcher (left), Hidetoshi Katou, (Associate Manager for Industrial Science and Technology Program, Planning Headquarters General Planning Office), X-ray and Positron Measurement Group (center), Takeshi Fujiwara, Researcher, Radiation Imaging Measurement Group (right)
AIST Tsukuba Central 2 1-1-1 Umezono, Tsukuba, Ibaraki 305-8568 Japan
TEL: +81-29-861-5300
E-mail: rima_info-ml*aist.go.jp (Please convert "*" to "@".)
|