富士通株式会社【代表取締役社長 秋草 直之】(以下「富士通」という)と綜合警備保障株式会社【代表取締役社長 村井 温】(以下「綜合警備保障」という)は共同で、人間型ロボットの応用例として、PDA・PHS等(以下「端末」という)を用いて外出先からインターネット経由でロボットに留守宅の管理作業を行わせる技術を開発した。
管理作業は、あらかじめ決められた定型動作を自動的に行う自律作業、ユーザが端末上のロボット搭載カメラ画像を見ながら室内の状況に応じて操作する手動作業、侵入者を検知して端末へ緊急メッセージを送出する監視作業の三種類が可能である。これらの作業を、PHS回線でインターネットに接続した端末のGUIから、室内に設置したPC上のWebサーバを介してロボットに実行させる。
本日の研究成果デモでは、外出先でガスコンロを消したかどうか不安になったという状況を想定し、自律作業・手動作業・監視作業を以下の手順で実施する。自律作業では、まず室内の作業場所とそこでの作業項目をサーバに登録する。次に、自律的に移動するための目印となる室内の物体をロボットに教示する。これによりロボットは指定された作業場所までの移動経路を自動的に生成することが可能になる。目印の教示は、トラッキングビジョンを用いたロボット搭載カメラ映像の画像処理により行う。
以上の準備の後でロボットを作業待機状態に置き、端末(PDA)のWebブラウザ上で作業場所と作業項目を選択(複数可)して実行を開始する。この後ロボットは全て自律的に動作し、指定された作業場所へ移動して作業を順次実行する。デモでは、ガスコンロのスイッチ操作を自律実行し、作業終了時には作業結果の画像をPDAに表示する。次に、コンロを消した後偶然見つけた室内のゴミを片付けるという想定で手動作業に移る。
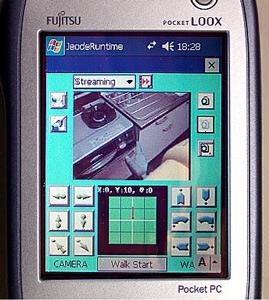
手動作業では対話的にロボットを操作する。室内の状況確認を目的として、ロボット搭載カメラの画像をPDA上に表示しながらロボットを前進・後退・旋回させ、カメラをパン・ティルト・ズームさせる。次に、室内のゴミ(空ボトル)をGUIから指定してロボットに把持させ、ゴミ箱に投下させる。以上の後で監視作業に移行する。
監視作業ではロボットを監視モードに設定し、端末(PHS)を待ち受け状態に置くことで侵入者検知の準備を行う。侵入者の検知はサーバの画像処理によって行う。
侵入者を検知するとその状況の画像を取得するとともに、緊急事態発生を告げる文字メッセージをPHSに送出する。PHSはユーザに通知するために、このメッセージを自動的に受信して表示すると同時にアラーム音を鳴らす。ユーザは直ちにPHSをWebサーバに接続して進入状況の画像を確認する。
現在急速に発展しつつある情報ネットワーク技術・モバイルコミュニケーション技術と人間協調・共存型ロボットシステムの結合は、遠隔地から携帯端末を使用して建物内の見たいところにロボットを移動させることによって見る、さらにはそこで簡単な操作を行う、という新しいサービスの提供を現実的なものとしつつある。人間型ロボットであれば、移動機能・作業機能において階段・狭い廊下・作業場所の高低といった人間の住環境との親和性が高いと考えられる。また、今後の少子化・核家族化の進展により家族構成人数が減少し、家が留守がちになればなるほど、こうしたサービスへの需要がますます増大することが予想される。例えばマンション等の居住ビルにおいて、警備保障会社が建物内に1台配備し、日常的な警備業務の遠隔遂行に加えて居住者にもプライベートな利用をサービスする、あるいは、旅行等で留守になる家庭をターゲットとした一般家庭向けのレンタルサービスを行う、といった形態であれば、近い将来の実現が期待できる。
本研究は、HRP全5年間の研究期間における後期3年間の応用研究の一環である。前期での成果として人間型ロボットHRP-1が提供されたことを受け、モバイル関連技術・機材が普及拡大し始めた当時の状況と合わせて本研究を開始した。PCに比べれば低い処理能力・回線速度で種類も多様なモバイル端末を複数使用すること、また、計算量の多い画像処理を用いること等により、Webサーバ・クライアント方式を採用した。これにより負荷分散・通信量削減および共通技術の活用を可能とするとともに、機能の多くをサーバに集中させたことにより、サーバ機能の拡張がクライアントを含めたシステム全体の機能アップをもたらすというメリットを得た。また、ブラウザ機能を持ち広く市販されているPDA・PHS(iモード携帯電話も可能)をそのまま遠隔操作端末として使用できる点が本研究の特色であり、これにより大多数の人々にとって身近な機器でロボットを操作することをより現実的なものとした。

|
|
 |
|
|
|
遠隔操作GUI(PDA)
|
○画像処理および遠隔操作技術(担当:富士通)
ロボット教示システム・端末のGUI・Webサーバ連携部分
○HRP-1制御技術(担当:綜合警備保障)
ミニマムコックピットの改造・作業時の腕の力制御・作業時にロボットが使用するツールの開発