株式会社日立製作所【取締役社長 庄山 悦彦】(以下「日立製作所」という)と、松下電工株式会社【代表取締役社長 西田一成】(以下「松下電工」という)は共同で、病院や施設などの介護現場で介護支援作業を行う対人サービスシステムを開発した。
日立製作所は、ロボットを動作させるための専門知識がない看護師や介護者等でも、介護の現場で、容易にロボットの動作を計画できるソフトウエア“拡張動作ライブラリ”を開発した。松下電工は、看護師や患者等のユーザがロボットに作業を依頼する際のユーザインタフェース“対話エージェント”を開発した。
対人サービス動作の例として、まず、看護師が拡張動作ライブラリを用いてロボットの動作計画を行い、動作コマンドを作成する。次に、対話エージェントが、看護師からの音声による依頼に応じて、一連の介護作業のスケジュールや作業の優先度の管理を行い、自発的に動作コマンドを発行する。ロボットは動作コマンドに応じて、看護師が計画した通りに物を運んだり、患者への体操のインストラクションのような全身協調動作を行う。また、ロボットは患者からの依頼に応じて、見舞い客の見送りなど身の回りの世話を行う。このとき、事前に計画できない作業は看護師にロボットを操作するように依頼し、遠隔操作によりロボットが作業を実行する。さらに、遠隔地の友人との会話内容に応じて、身振りを交えたコミュニケーションの支援を行う。
【動作生成と実行】
 |
|
拡張動作ライブラリ
|
【対話エージェントによる動作指示】
なお、二足歩行動作の基本制御ソフトは産総研が、人間型ロボットのハードウェアは本田技研工業株式会社が製作したものである。
超高齢社会の到来、要介護者の増加、少子化等による介護労働力不足が問題となっており、医療福祉分野では、介護者の負担を軽減したり、被介護者が気兼ねなく介護を受けられるようにするためにロボット技術を用いた支援が求められている。特に、人間型ロボットは人間との親和性が高く、病院や施設などの介護現場で働くことに対する期待が大きい。対人サービスを行うロボットには、歩行機能だけでなく手腕を用いた作業機能が必要である。このような高度なロボットシステムを動かすための、ロボットの簡易操作インタフェースやコミュニケーション支援技術の開発が急務となっている。
日立製作所と松下電工は、対人サービス分野での研究開発を進めている。対人サービスの重要なテーマは介護支援であり、介護現場において必要となる多様な介護支援動作を実現するために、人間型ロボットプラットフォームの動作生成システム、制御システムおよび人間とのコミュニケーションシステムからなる実証システムを構築し、機能確認を行ってきた。平成12年度に作成した対人サービスシナリオに基づき、平成13年度に本田技研工業株式会社製のソフトウェアを用いて、見舞い客の案内や遠隔操作による薬の手渡し等のロボットの基本動作を確認した。さらに、平成14年度に産総研製の制御ソフトを用いて、体操のインストラクションのような複雑な全身協調動作を実現した。
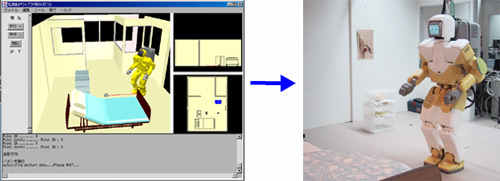
○拡張動作ライブラリ(担当:日立製作所)
看護師等のユーザは、拡張動作ライブラリを用いることにより、仮想環境の画面上の簡単なマウス操作でロボットに作業を実行させるための動作コマンドを生成することができ、介護支援作業で必要な身振り、手振りを伴うコミュニケーション動作や体操のような全身協調動作も簡単に実現できる。生成した動作コマンドはロボットの物理的な特性を組み込んだシミュレータによりビジュアルに3次元空間での動作を確認できるので、動作コマンドをロボットに入力するだけで計画した作業を確実にロボットに実行させることができる。
○対話エージェント(担当:松下電工)
対話エージェントは、看護師や患者のようにロボットと直接対話ができるユーザにはCGで作成した疑似的な顔とロボット自体の身体動作を用いて対話し、遠隔地の家族にはネットワーク経由で音声のみで対話することにより、ユーザが要求する作業内容を把握する。また、ユーザから指示される作業スケジュールを管理し、途中で他のユーザから作業依頼があれば、優先順位に応じて作業を実行する。さらに、遠隔地の家族と患者との会話の中に身体動作に変換可能な言葉があれば、音声に動作を加えて表現することができる。
ユーザが依頼した一連の介護作業の中で、事前に計画できる定型作業は拡張動作ライブラリで生成した動作コマンドにより実行し、事前に計画できない非定型作業はユーザによる遠隔操作で実行する。遠隔操作は省スペースの“簡易操作遠隔コックピット”から行う。