フィジカルAIとは?
フィジカルAIとは?
2026/05/13

フィジカルAI
とは?
科学の目でみる、
社会が注目する本当の理由

フィジカルAIとは?
フィジカルAIとは、身体を持ち、実世界の中で行動する人工知能(AI)のことです。ロボットやヒューマノイドだけでなく、自動運転車や工場内で稼働する産業機械も、その一例にあたります。これまでのAIが主に情報を認識し、判断する役割を担ってきたのに対し、フィジカルAIは判断を実際の動きとして実行できる点が大きな違いです。
AIがいよいよ実世界で動き始めています。急速に発展してきたAIとロボティクスが融合し、「フィジカルAI」として人間の作業を支援する世界が現実のものになりつつあります。物理的なデータの不足、身体感覚の学習、安全性など、技術的な課題は多く、実現は遠いものと考えられていましたが、続々と新しい解決手法が示され、普及が現実味を帯びてきました。産総研でフィジカルAI開発を主導するチームの一つ、人工知能研究センター 実体知能研究チームの堂前幸康 研究チーム長に、フィジカルAI開発の現在地と産総研が果たす役割を聞きました。
フィジカルAIとは
フィジカルAIの定義
従来のAIはインターネット上にあるテキスト、画像、動画などの膨大なデータを学習することで、AIが人間並みの理解能力、対話能力、画像や動画の生成能力を発揮するようになっています。それに対して、「フィジカルAI」とは、身体を持って実世界で動くAIです。ロボット、ヒューマノイドを始め、自動運転車、工場内で動く産業機械を制御するAIなどもフィジカルAIのカテゴリーに入ります。AIに学習させるデータとして、視覚と言語のデータはインターネット上に多くありますが、例えば、物を持ったときの触覚や力覚などのデータはインターネット上に多くはありません。今のAIはそういった感覚を多く持っておらず、上手く使いこなすこともできていません。実世界のデータをどうやって取得し、どうやってAIに学ばせ、どのように活用させるかが、高度なフィジカルAIの実現のための課題です。
注目されている理由
フィジカルAIで注目される分野の一つはロボットです。近年、ロボット学習を支える技術が大きく進化しています。従来もシミュレーションは使われてきましたが、現在は「大量の並列演算環境」を活用することで、多数のロボットが同時に学習できる時代になりました。シミュレーションの精度が多少低くても、データ量とバリエーションを十分に確保することで、現実世界でそのまま動けるロボットも出てきました。
 シミュレーションを使った並列学習の例
シミュレーションを使った並列学習の例
さらに、動画から学習したAIが、視覚情報だけから物体の性質や動作のポイントを推測する能力を獲得しつつあり、ロボットの制御にも応用できる可能性が示されています。実データと動画データを組み合わせた学習手法の有効性も、近年さかんに検証されています。
また、人がカメラやロボットハンドを手に持ち、さまざまな作業を実演することで、人の作業を効率的にデータ化する手法も広がっています。人間の振る舞いをロボットがまねて学ぶ「模倣学習」により、これまで難しかった細かな手作業の再現も可能になりつつあります。
こうした新しいデータ収集や学習の手法は、従来の方法と比べて汎用性が高く、現場への適用もしやすいという特徴があります。柔軟に多様な作業をこなす“賢いロボット”の実現が見えてきたことが、フィジカルAIが今、大きな注目を集めている理由の一つです。
フィジカルAIの活用
活用が期待される分野
フィジカルAIの活用が特に期待されているのは、肉体的な負担が大きい作業の現場です。労働生産人口が減少している日本では、製造や物流の現場での運搬・組み立て・品出しといった労働集約的な作業に加え、家庭内で対話しながら家事をこなす場面など、幅広い分野で、物理的な労働力の代替や補助として、フィジカルAIの力が求められています。
皆さんもレストランの配膳ロボット、物流倉庫の搬送ロボット、自動運転車などが日常的に使われているのを見たことがあると思います。広い意味ではこれらもフィジカルAIの一例といえます。
現在はさらに進んだ研究が行われており、視覚・言語・行動が結び付いた高度な対話能力を持つロボットが実現しつつあります。個別に作業を教え込まなくても、「こうしてほしい」と伝えるだけで多様な作業に対応できるような、より高度なフィジカルAIの登場も近づいています。
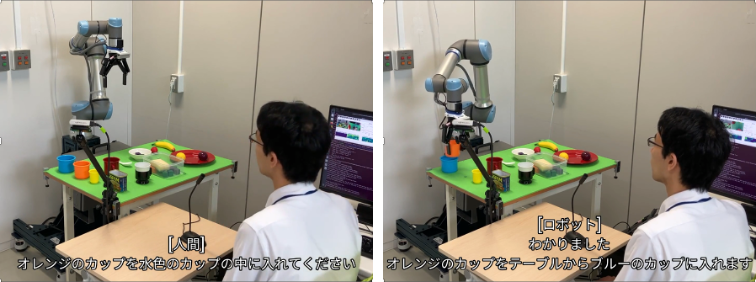 産総研の実験環境で対話的に作業をするロボットの研究が進んでいる
産総研の実験環境で対話的に作業をするロボットの研究が進んでいる
人間との関わり方
「人間の仕事がすべて、フィジカルAIに置き換わってしまう」。そんなイメージが語られることもあります。しかし実際には、人間とAIが協力し合う方向性が現実的です。例えば、熟練技術者の身体的な負担が大きくなってきた場面で、フィジカルAIが動作を補助し、生産性を維持・向上させることが可能です。
トヨタ自動車(株)と産総研が行った実証実験では、電装品の組み付け現場で、作業者の身体的負荷をフィジカルAIがセンサーでリアルタイムに把握し、重い部品のピッキングを支援しました(2023/01/31プレスリリース)。作業全体の効率が改善され、人の負担を減らすという明確な成果が得られています。このように、人と協働し、人間の能力を拡張するタイプのAIも、フィジカルAIの重要な姿のひとつです。
一方で、介護のように人の身体に直接触れる作業への導入は、依然としてケガのリスクがあり、慎重な検討が欠かせません。最も難易度の高い応用領域と言えるでしょう。しかし、AIとロボットの両面から、安全性を多角的に確保できるようになれば、こうした領域でもフィジカルAIが活用される未来が見えてきます。
普及に必要な技術と産総研の挑戦
進めている研究開発や開発支援
本格的なフィジカルAIの社会実装と普及に向けて、産総研では多面的な取り組みを進めています。2023年に開始したプロジェクトでは、企業のエンジニアが開発に着手しやすくなるよう、学習データの収集や開発環境の整備を行ってきました。また、開発にかかるコストや時間の負担を下げるため、シミュレーションソフトウェアの無料公開、汎用ロボット学習用フレームワークの提供、約1万件の作業動作を含む双腕ロボットデータセットの無償公開なども実施しています。
さらに、人間が持つ多様な身体感覚を扱うため複数の感覚モダリティを統合するロボット向けAIモデルの構築プロジェクトを開始しています。既存のVLA(視覚・言語・アクションモデル)では不足している「身体性」を補い、より器用で人間らしい動作生成を可能にするロボット基盤モデルの開発を目指しています。
この一つの例として、身体感覚どうしの関係性(クロスモーダル)を学習に使う研究を行っています。人間は、生まれたときから「見て、触る」ことを繰り返しながら、視覚と触覚の対応関係を長い時間をかけて学びます。その結果、ゴムボールの柔らかさを見ただけで推測したり、ペットボトルのつかむ位置によって硬さが変わることを直感的に判断できたりするようになります。こうした「見え方」と「触れたときの感覚」など、異なる感覚のつながりを、シミュレーション空間で大量にAIに経験させることで、従来の“視覚だけに依存したロボット”よりも、高度な作業を少ない経験から学ぶ可能性が見えてきています。
双腕ロボットAIの研究開発を⽀援する1万エピソードのデータセット「AIST Bimanual Manipulation Dataset」を無償公開している
産総研のミッションとビジョン
視覚や言語の生成AIと比べると、フィジカルAIの学習には膨大な実世界データが必要であり、その不足量は「10万年分」とも言われています。一見、途方もない数字に思えますが、もし世界のインターネット人口で分担すればわずか9分弱、日本国内だけで分担しても9時間弱で集まる計算になります。国内の力を合わせれば十分に集められる規模であるという点は、極めて重要です。
この分野ではアメリカや中国が先行し、国際情勢も大きく揺れ動いています。しかし、フィジカルAIは国内だけでデータを収集し、自前でモデルを構築・運用することも可能なのです。海外に依存せずに開発を進められる点は、安全性の確保という意味でも大きな強みになります。
⽇本におけるロボット基盤モデル開発の舵取り役として、2025年に⼀般社団法⼈AIロボット協会(AIRoA)が設⽴されました。産総研も参画し、連携を進めています。産学官と連携しながら、実社会への普及を進めることが産総研のミッションです。
ロボットの学習には10万年分のデータが必要だという仮説を紹介しましたが、一方で、人間は18歳までの約14万時間(睡眠時間を除く)で驚くほど器用な身体能力を獲得します。この場合、人間の学習効率はロボットの6000倍になります。この差を埋めるために、効率的な学習モデルや学習手法、多様な実世界データを取得するためのセンサー技術や連携研究を進めています。
こうした取り組みにより、ビッグテック企業が膨大なデータを独占してモデルを構築し、それを活用する時代から、日本の中小企業でも、少ないデータで自律的に機械を動かせる時代への転換が期待されます。アメリカや中国ではすでに家庭用ヒューマノイドの商用化が始まり、その開発を支える研究者も多いですが、日本にも高度な産業用ロボットをつくってきた開発者やシステムインテグレーター(SIer)が多数います。これらの人々がフィジカルAIの基盤を活用し始めることで、AIとロボティクスの両方に強い開発者が増え、この分野の日本の競争力向上につながることを期待しています。
産総研を中心とする産学連携チームは、AIRoAが主催して2025年度に開催された「ロボット基盤モデル開発コンペティション」にも出場し、データキュレーション技術を強みに、競技で優勝しました。(2026/5/12受賞)