ここにもあった!産総研
自動運転技術開発に見る産総研の歩み
世界初、コンピュータビジョンを用いた自動運転システム搭載の「知能自動車」を開発
近年、自動運転車の研究開発には自動車メーカーだけでなくIT企業も参入し、大変な盛り上がりを見せているが、実は自動運転車の研究開発の歴史は長い。1939年、米国のゼネラルモーターズ社によって初めて、自動運転システムは提案された。事故と渋滞の防止を目的に、本格的な研究が始まったのが1950年代だ。この米国の動きを受け、日本でも1960年代から研究がスタートした。最初に手がけたのは通商産業省工業技術院機械技術研究所、つまり現在の産総研だ。全国の乗用車の保有台数がまだ46万台弱と、現在の保有台数の約1 %しかなかった時代のことである。産総研の自動運転技術開発の歩みを追う。
道路に埋めた電線で車両を誘導
1960年代、産総研が開発したシステムは、走行経路の道路に電線を埋め、そこに電気を流して発生した磁界を検知することで、ハンドルを制御して車両を走らせるというものだった。現在のような小型で十分なスペックをもつコンピュータがない時代、研究者は電線を流れる電流量などを計測する電子回路や、その信号を処理するシステムを一から手づくりしたという。このシステムによる「自動操縦車」は、1967年には時速100 kmの自動走行に成功している。
この方式は現在、ゴルフ場のゴルフカート自動走行システムや工場内の自動搬送システムに受け継がれているが、道路にケーブルを埋設し電気を流す必要があるのに加え、車両の真下からの信号を受けて走るため、少しでもずれが生じると走行が不安定になるという欠点があり、高速で走る自動車などに展開できる技術ではなかった。
 自動操縦車(1962~67年)
自動操縦車(1962~67年)
走行経路に電線を埋め、そこに電気を流して車を制御した。
ITSの先駆けとなったコンピュータビジョンによる自動運転システム
そこで1970年代に産総研が始めたのが、カメラで撮影した画像から距離を算出して、路上の3次元物体(ガードレール)を検出する方法である。1977年産総研は、このように車両前方の情報をコンピュータビジョンによって認識・処理して走る世界初の自動運転システムを搭載した「知能自動車」を開発し、1978年には時速30 kmの走行実験に成功した。コンピュータビジョンのうち2台のカメラで距離を計測する方法は、ステレオビジョンと呼ばれ、現在のぶつからない車に使われているセンサーや車両の制御技術の先駆けと言える。
さらに、1980年代前半からは、センサーなどからの情報を得て車体の位置を測位する機能が追加され、コンピュータビジョンで障害物を検出し、測位機能と走路の地図データベースを用いて自動走行するシステムができあがった。この知能自動車に関する津川定之(当時・工業技術院機械技術研究所)らの論文は2000年代になっても引用され、ITS(Intelligent Transport Systems:高度道路交通システム)分野におけるAVCSS(Advanced Vehicle Control and Safety Systems:先進車両制御安全システム)の基礎になる研究として、その後のコンピュータビションを用いた運転支援システムの実用化や、自動運転技術の進展に少なからぬインパクトを与えたとされている。
一方、渋滞を避け、安全な運転をサポートするための運転支援システムの開発も進められた。この運転支援システムの先駆けとなったのが、産総研が企業とともに経済産業省の大型国家プロジェクトで開発したCACS(Comprehensive Automobile traffic Control System:自動車統合管制システム)だ。この技術は、現在広く使われている渋滞や目的地までの所要時間などの情報を随時カーナビに送信するVICS(Vehicle Information and Communication System:道路交通情報通信システム)の前身となっている。
CACSは、時々刻々の動的な交通状況を考慮する経路誘導システムとしては世界初のもので、1977年、システムを搭載した車両と搭載していない車両の、どちらが先に目的地に到着するかを競い合う実験を東京都心で行ったところ、搭載車両が勝利し、システムの有効性・利便性が確認された。
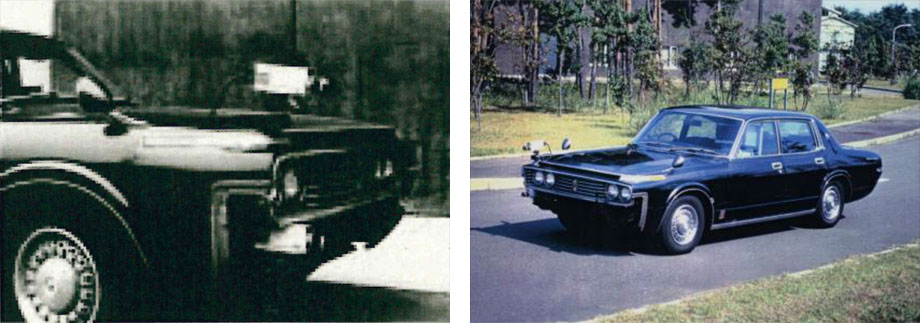 知能自動車(1974~84年)
知能自動車(1974~84年)
コンピュータビジョンによって車両前方の情報を認識・処理して走る。
協調走行技術でより安全で「エコ」な交通システムへ
1990年代に入り、産総研は、それまでの個車の自動運転研究に通信技術を加えた協調走行の研究を進めてきた。その一つが、イルカが仲間と“会話”をしながら同じ方向に泳ぐように、車車間通信によって前後の車両の走行情報を把握し合い、複数車両が協調して走る技術だ。このような車車間通信と運転制御が実現すれば、それぞれの車が、周囲の車の運転状況に応じて、センサーで捉えるよりも確実に加速・減速したり、車間距離を保ったり、適切なタイミングで合流したりできるようになる。
2000年には、自動運転車5台による合流や追従などのさまざまな協調走行のデモを公開した。この頃の自動運転技術は、乗用車の安全で快適な走行だけではなく、トラックやバスの隊列走行により二酸化炭素の排出量を低減するという、省エネルギー化のための有力な技術としても注目されていた。産総研では、日本自動車研究所など15の企業・機関とともに、NEDOプロジェクト「エネルギー ITS推進事業」に参加。この成果は、2013年2月、4台のトラックによる時速80 km、約4 mの車間距離での隊列走行の成功として結実した。車間距離を短くすることで空気抵抗を減らし、全体で約15 %の燃費削減も実現している。
現在、産総研では企業や大学などと連携して、自動運転や協調走行、隊列走行を応用した新しい交通システムの提案と研究開発に取り組んでいる。目標は2020年頃の実用化だ。
自動運転や運転支援システムにおいて、車の制御を主とした産総研の基盤的な技術開発は、先駆的・先導的研究として、これまで業界に少なからず影響を与えてきた。
2015年、産総研には、自動車ヒューマンファクター研究センターや人工知能研究センターが発足し、自動運転システムにおけるHMI(ヒューマンマシンインターフェース)*1やAI(人工知能)の応用に積極的に取り組んでいる。自動運転の技術は、自動車メーカーなど各企業が、しのぎを削って開発を進めているが、産総研には、企業間の協調領域となるシステムの評価や、社会受容性の検証を含め、実社会で使える研究開発を進める役割がある。例えば、AIの応用が期待されているが、その限界や安全性の証明などを、実際にユーザーが使用する車の制御と関連づけて進めている研究もその一つだ。
自動運転車の実用化に向けて、産総研の果たすべき役割は大きい。
 時速80 km、車間距離約4 mの隊列走行実験風景(2013年2月)
時速80 km、車間距離約4 mの隊列走行実験風景(2013年2月)
産総研つくば北サイトのテストコースにて)
*1: 人間と機械が情報をやり取りするための手段や、そのための装置・ソフトウェアなどの総称。[参照元へ戻る]