2019年2月28日掲載
取材・文 黒田 達明
なぜ「ヒト型」でなければならないのか?
「ヒト型ロボットが大工仕事をしている!」
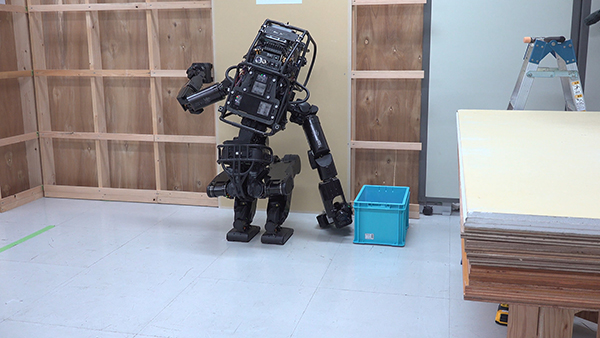
YouTubeに公開されたある動画がいま、国内外の注目を集めている。人間の形をしたヒューマノイドが、作業台の上に平積みされた石膏ボードから一枚をつかみとり、壁まで運んで立てかけ、片手でそれを押さえながら、もう片方の手で箱からピックアップした電動ドライバーを使って、壁にビス止めしているのだ。
再生回数105万回超! 世界が驚いたロボットのデモ動画
動画は産業技術総合研究所が昨年の9月27日に公開したもので、4か月後の今年1月29日時点で、再生回数はなんと105万回を超えている。
噂を聞いて、さっそく動画に見入る探検隊員たち。
「たしかにすごい! ロボットが人間みたいに働いている。アシモフが小説に書いたような未来世界が本当に到来するのだろうか!?」
けれども、興奮する隊員たちの心に、どこかひっかかるところもあった。
最近は町中やメディアで、胸にディスプレイを付けたヒト型ロボット「Pepper」など、ヒューマノイドをちらほら見かけるようになった。それらはどれも、「コミュニケーション」を主目的として作られている。つまり、ヒト型をしているのは人間とコミュニケーションするためだ。
一方で、産業用ロボットはそれらとはまったく違う方向で進化している。建設業界でも、災害の復興やオリンピック特需などで作業現場での労働力が求められているが、少子高齢化で人手不足が深刻化していることから、ロボット技術への期待が高まっている。大手ゼネコン各社ではすでに、現場への試験的な導入も始まっている。
しかし、それらはいずれもヒューマノイドではない。溶接作業専用のアームがついていたり、資材搬入のための車輪がついていたりと、人間とは似ても似つかない現場作業に特化されたロボットだ。
「現場仕事をさせるのに、ヒト型である理由はなんだろう。そもそも、ヒト型にこだわる必要があるのだろうか。ヒューマノイドはもう、SFやアニメの世界の中だけのノスタルジーなのでは?」
そんな疑問をぶつけるべく、探検隊は、動画に登場するヒューマノイドの開発者を訪ねてみることにした。
「ヒト型」には理由があった
研究室を訪ねると、そこではまさに、あのヒューマノイドがYouTubeの動画と同じデモを行っている真っ最中だった。石膏ボードを両手に抱えてゆっくりと歩む、黒々としたボディが目に飛び込んでくる。
ヒューマノイドは石膏ボードをモックアップの壁に立てかけたところで、しばらく静止した。動作はしていなくても、ボディから冷却ファンのうなりが響き、“顔”では円筒形のものが絶え間なく回転している――その様子が、どうにも「いま考え中」のように見えてしかたがない。次に何をするか。それを決めるのは“彼自身”……そう思えてくるのだ。
身長182センチ、とやや大柄なヒトサイズの“彼”の名は「HRP-5P」。産総研の前身である通産省工業技術院の時代から、20年かけて研究されてきたヒューマノイド「HRP」シリーズの最新バージョンだ。
開発メンバーの一人として、HRP-5Pの仕事ぶりを厳しい目で見つめている産総研・知能システム研究部門ヒューマノイド研究グループ主任研究員の阪口健さんに、我々はおそるおそる疑問をぶつけてみた。
――仕事の効率を考えたら、ヒト型ではないほうがよくないですか?
「よく言われます。いま見ていただいた、石膏ボードをビス止めする仕事をするのに、5Pは7分もかかってますからね」
意外にも阪口さんは、笑って答えてくれた。「5P」は“彼”の名前の略称だ。しかしそのあと、阪口さんは真顔になってこう続けた。
「だけど、僕らが目指しているのは、建築現場などで特定の仕事がスピーディにできるロボットではありません。実社会に入ってきて、人と一緒に働いたり、人を助けてくれたりできるロボットなんです。社会のインフラや道具のすべてが、人の身体を前提にデザインされていることを考えれば、そこに入っていきやすいロボットも、必然的にヒト型になるわけです」
 阪口さん
阪口さん
なるほど、町中を人とロボットがともに、当たり前のように行き交う、そんなSF小説を地で行くような未来を、阪口さんたちは真面目に、しかも正面突破によって、実現させようとしている、ということのようだ。
ならば、阪口さんたちのヒューマノイドは実際にいま、どこまで人間に近づいているのだろう。隊員はさらに質問を続けた。
想定外の事態にも自分で考えて対応できる
――HRP-5Pはどこまで自分で考えて作業をしているのですか?
「基本的には5Pは自律的に判断して行動しています。こちらとしては、台の上にある石膏ボードを持って、あそこの壁に打ちつけよ、といった大まかな指示を最初に与えているだけです」
――あの作業で一番頭を使うのは、どうやって台の上のボードをつかむか、ではないかと思いますが、そこも5Pが自分で考えているのでしょうか?
5Pは台の上にある石膏ボードを持ち上げるために、まず、脚の前面を台の縁に当てて体重をそこにかけるようにしながら、ボードの上に覆いかぶさるような前傾姿勢をとる。
次に、自分から遠いほうのボードの端に、手の甲に当たる部分にある突起をひっかけて、一番上のボードだけを手前に引き寄せている。そうすることで、一番上のボードだけが手前にずれて、そのボードがつかみやすくなるのだ。
HRP-5Pが石膏ボードを持ち上げる手順
 (1)脚の前面を台の縁に当てて体重をかけ、ボードに覆いかぶさるように前傾姿勢をとる ©産総研
(1)脚の前面を台の縁に当てて体重をかけ、ボードに覆いかぶさるように前傾姿勢をとる ©産総研
 (2)ボードの端に手の甲にある突起をひっかけ、一番上のボードだけを手前に引き寄せる ©産総研
(2)ボードの端に手の甲にある突起をひっかけ、一番上のボードだけを手前に引き寄せる ©産総研
 (3)ボードを回転させて持ち上げる。バランスが崩れないよう高出力モーターが制御している ©産総研
(3)ボードを回転させて持ち上げる。バランスが崩れないよう高出力モーターが制御している ©産総研
阪口さんは言う。
「ボードのつかみ方に関しては、僕らがまず考えて、シミュレーターで検証したうえで、一番よいと思われるやり方を教えてあります。作業方法を考えるときに、人間が自分の身体感覚に頼りながら考えられるのは、ヒューマノイドのとても便利なところです」
では、直面した状況が教えられた想定と異なっていた場合にはどうだろう? たとえば、持とうとしたらボードがとても重かったら……。
「石膏ボードは約11キログラムの重さなのですが、1~2キロの変化なら5P自身が判断して行動を調整できます。10キロも変わってしまったら無理ですが。実際、石膏ボードは湿気を吸うので、重さは環境によって変化するんです」
ボードの重さだけでなく、作業台の位置や高さなど、さまざまな要素に多少の想定違いがあっても、5Pはその場で、自身で判断して対応できる。あらかじめプログラムされた行動を機械的に再現しているだけではないのだ。
「道具を使えること」が課題だった
5Pを見ていて「人間っぽさ」を感じるところのひとつに、工具を手に持って働いているという点がある。
ドライバーやドリルなら、必要に応じてロボットの身体からニョッキと出てきてもよさそうだが、“彼”は人間がするように、工具を箱から取り出して使っている。ロボットを広い意味で「道具」と呼んでいいなら、道具が道具を使う、というちょっと不思議な状況になっている。
「人間のために設計された工具や機械をそのまま扱えるというのは、HRPシリーズのかねてからの課題だったんです」
そう言ったあとで阪口さんは、小さな秘密を明かしてくれた。
「実は、デモで使っている電動ドライバーは、ちょっとだけいじってあるんです。5Pは指が3本しかなく、じゃんけんで言えばグーパーしかできないので、トリガーを引くことができません。なので、無線でスイッチが入れられるようにしました。まあ、人間でも職人さんは工具を自分用にカスタマイズしたりしますから、このくらいは許容範囲ではないでしょうか」
阪口さんは続ける。
「それよりも、ロボットが工具をつかんでビスをまっすぐに止められているという点に注目してください。簡単に見えても、ロボットにはなかなか難しいことなんです。解決方法を思いつくまでは、何度試してもビスが曲がってしまうので、かなり苦労しました」
 低い位置のビス止めも電動ドライバーを使って正確にこなせる ©産総研
低い位置のビス止めも電動ドライバーを使って正確にこなせる ©産総研
工具の持ち方がほんのちょっとズレただけで、ビスは曲がってしまう。人間には、手にした工具をあたかも自分の身体の一部のように感じて、工具の角度を繊細に調整できる能力がある。だから、ボードに対して垂直にビスをねじ込むことは難しい課題ではない。
ところが、5Pのようなロボットには自身の身体に対する感覚などないから、手にした電動ドライバーを身体の延長として扱うためには、自分の手と電動ドライバーが精密な位置合わせによって正確に結合している必要があるのだ。
それには、あるブレイクスルーが必要だったという。
「産総研の別のグループが開発していた視覚マーカーが使えないかと思いついたんです。レンチキュラーレンズというものを使って、微妙な角度のズレを検出できるマーカーです。これを工具に貼れば、5Pの手のひらにはもともと小さなカメラがついていますから、マーカーが真正面に来るように位置合わせをしながら工具をつかむことができるようになります」
 電動ドライバーに貼られた視覚マーカー
電動ドライバーに貼られた視覚マーカー
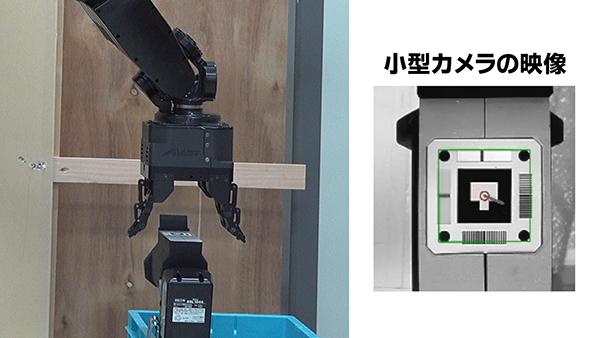 手のひらのカメラと電動ドライバーのマーカーで位置合わせをして、正しい角度で工具をゲット! ©産総研
手のひらのカメラと電動ドライバーのマーカーで位置合わせをして、正しい角度で工具をゲット! ©産総研
レンチキュラーレンズとは、断面がかまぼこ型の凹凸が、畑の畝(うね)のように並んだもの。読者の皆さんも、見る角度によって絵が変化するステッカーをどこかでご覧になったことがあると思う。表面を触るとザラザラしている、あれのようなものと思っていただければいいだろう。
“顔”に搭載されたホットな技術
もう1つ注目すべきなのは、5Pが自分の掲げた石膏ボードで視界を遮られた状態のまま、壁際へと移動しているところだ。
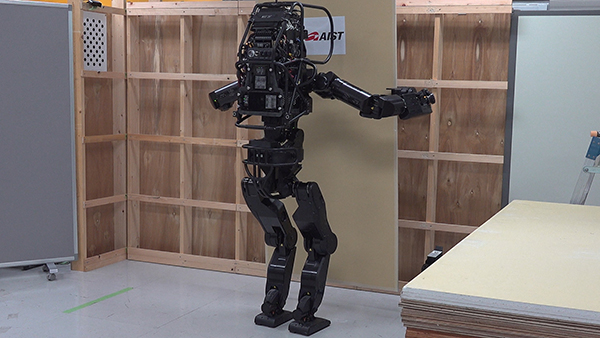 5Pは前が見えなくても目指す場所に移動できる ©産総研
5Pは前が見えなくても目指す場所に移動できる ©産総研
5Pはあらかじめ周囲の環境をレーザー測定し、3次元マップを作成しておき、動作中は常に、自身がそのマップ上のどこにいるかを把握している。だから前方が見えなくても、目的の場所へと移動できるという。
これは、人間が作業する場所に到着したら、まずあたりを見回して、だいたいどこに何があるかを把握しておくのと一緒だ。人間だって前が見えなければ、そのときの記憶を頼りにして、石膏ボードを壁まで運ぶだろう。
 作業する環境を測定し、自分の位置を把握する新技術「SLAM」を解説する阪口さん
作業する環境を測定し、自分の位置を把握する新技術「SLAM」を解説する阪口さん
「ここで使っている技術は、SLAM(スラム:Simultaneous Localization and Mapping)といって、自己位置同定と地図づくりを同時に行うホットな技術なんですよ。環境の測定はレーザーレンジファインダーで行っています」
そう言って阪口さんが指さした、例の“顔”のところで回転しつづけている円筒形の装置こそがレーザーレンジファインダーだ。
それはレーザー光を使った距離計で、5Pに搭載されているものは、円筒形の周囲270度の平面を1本のレーザー光でスキャンして、検出物までの距離を測定できる。装置そのものを回転させることで、スキャンする平面を回転させ、立体的に周囲の環境を把握できるというわけだ。
データはたえず更新されていて、作業中に障害物が足下に転がってきても対処できるという。
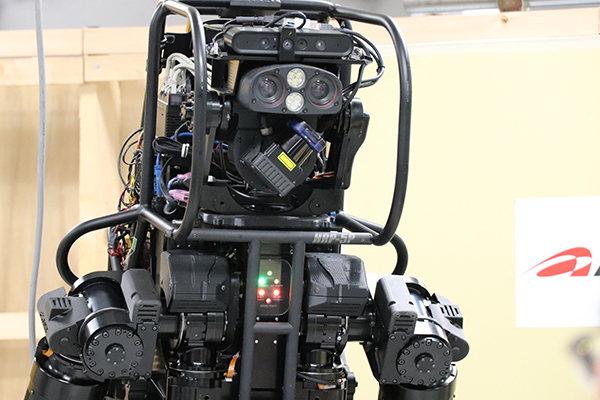 5Pの「眼」の下、人間でいえば「口」のあたりで回転するレーザーレンジファインダー
5Pの「眼」の下、人間でいえば「口」のあたりで回転するレーザーレンジファインダー
「ただし、もし認識できていないものにぶつかったら、その場合は転倒してしまうでしょう。実は、5P開発中にぼくの家では双子の娘が生まれて最近歩きはじめたのですが、赤ん坊の彼女たちを見ていると、歩いていて障害物に当たっても、それが動かせるものならグイグイ押していくんですね」
「障害物から受ける抵抗を感知して、転ばずに進むことができる。人間はよくできているなと思いました。5Pにそれをやらせようとしたら、まずトルクセンサーを搭載しないといけない。そうすると、その分の重量が増えるし、バッテリー消費も早くなってしまいます」
5Pの頭部にはこのほかにカメラと、額のあたりには「Astra(アストラ)」というセンサーが搭載されている。テレビゲームにはコントローラを使わずにジェスチャーで操作するタイプのものがあるが、その場合にジェスチャー認識に使われているセンサーだ。
「人間ならどれも眼に相当するセンサーですが、5Pではセンサーを視覚認識系と距離認識系で使い分けているんです。センサーはほかには、自分の姿勢を検出するジャイロセンサー、手首と足首にフォースセンサー、そして手のひらに小さなカメラが付いているくらい。少ないでしょう? 必要性とバッテリー消費やコストを総合的に判断して、センサーの数を絞り込んでいるんです」
話はここから裏話へと移っていった。
“頭脳”の意外なスペック
「人間らしさ」を追求するのであれば、最近話題のAIやディープラーニングなども組み込む必要がありそうだ。5Pにはそういったものは使われているのかと質問すると、阪口さんはこう答えた。
「工具の認識、つまりこれから使うべき工具はどれか、を選ばせる際には、ディープラーニングを使っています。いろいろな工具を並べておいても、90%以上の精度で正しい工具を選ぶことができます」
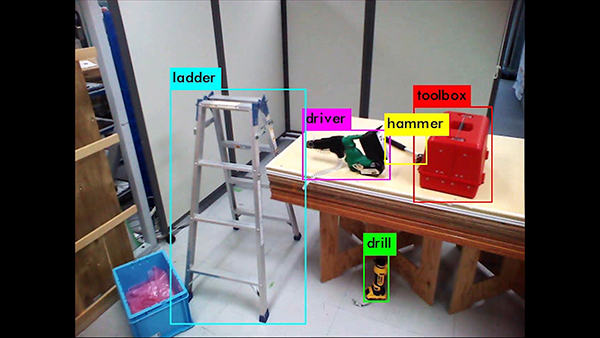 どの工具を選ぶべきか、ディープラーニングを使って認識している5Pの視界 ©産総研
どの工具を選ぶべきか、ディープラーニングを使って認識している5Pの視界 ©産総研
しかしそのあと、こう続けたのだ――。
「本当は、同じ作業を繰り返すうちに、どんどん動きが洗練されていくような学習もできたらよいのですが、そこは望めません。5Pはそれほど高性能のPCは積んでいないんです。動作全般を決めているコントロール系と視覚系の2つのPCを積んでいるのですが、どちらも消費電力の低いモバイルノート用のものなんですよ」
「ヒューマノイドは外部から電源を供給しない自立型ロボットですから、PC以外にもモーターやセンサーなど、いろんなところに電力を振り分け、そのなかでバッテリーの持ち時間を気にしながら作業しなければならない。なので、フルスペックPCをガンガン回せるわけではないんです」
なんと、最先端のヒューマノイドの頭脳は、我々がふだん使っているPCのようなものだという!
土地開発にたとえてみれば、大企業はあらかじめ算段のできた土地に対して、ここぞとばかりブルドーザーやパワーシャベルを投入して、圧倒的なスピードとパワーをもって整地していく。
それに対して産総研の阪口さんたちは、未開の土地を一歩一歩、踏みしめながら地ならしをして、どこにどれだけの力を注ぐべきかを繊細に見極めつつ、ヒューマノイドと二人三脚で少しずつ目的地へ近づいていく。その道は細い「けものみち」のようでも、その先には人類未踏の理想郷があることを信じて。
「おかしくなりそう」なときもあった
――5Pを作るにあたって、最も苦労したのはどんなところですか?
「とても複雑なシステムですから、バグを見つけるのが大変でした。なにかうまくいかないことがあっても、どこに問題があるのか、なかなか見つからない」
「ロボットに必要な技術の、それぞれの専門の研究者が集まって作ったのですが、皆、自分のやっていることに自信があるから、問題はほかの研究者の担当部分にあると思いがちなんです。しかも、各自が別々の学会に所属していたり、他のグループのメンバーにも横断的に協力してもらっていたりしたので、それぞれに違う研究スケジュールがあって、思うように詰めていくことができない」
そこで、阪口さんたちが採用したのが「チケット制」だった。
問題を発見したらメンバーに対して「こういう問題があります」というチケットを、とあるウェブサービス上で発行する。そのとき、対応すべきと考えられる人の候補を挙げておく。指名された人は自分の担当部分で検討して、問題なしと判断すれば別の人を指名する。対応されずに放置されると、「このチケットは◯日間未対応です」とリマインドのメールが送られてくるという仕組みだ。
こうしたチケット制で取り組んだバグ潰しで、とりわけ手こずったのは、ロバストネスを高めることだったという。ロバストネスとは、「外乱」に対するシステムの安定性のことだ。端的に言って5Pの場合は、予期せぬところで転んでしまうという問題だった。
「後ろに倒れるなら、うまく尻餅をついて被害を防げるように取り組んできたのですが、横に倒れられると痛いんです。腕が壊れてしまったら、最悪、修理に数ヵ月を要します。そして、5Pは一体しかありません」
実際、阪口さんたちがようやく5Pを完成レベルにまで仕上げ、『プレスリリースできます!』と上司に報告したら、直後に転んで破損してしまい、発表を数ヵ月延期せざるをえなかった、という苦い経験もしているという。
「予算を頂戴してますし、年度年度のシメというのもありますから、“何が何でも今月中にデモの精度を上げなくては!”と土日返上で夜遅くまで詰めたことも何度かあります」
「3歳の息子には『お父さん帰るのが遅い! もっと遊んで!』と連日責められるし、生まれて間もない双子の赤ん坊は昼夜問わずギャンギャン泣くし、実験がうまくいかないことや慢性の睡眠不足も手伝って、ついイライラしちゃって……。でも、もちろん子どもに罪はありませんし、自分で選んだことなので気持ちのもっていきようがなくて、おかしくなりそうなときもありました」
息子さんにしてみれば、お父さんをロボットにとられたような気持ちだったのかもしれない。
「やっと一段落ついて、平日に振替休日をとったとき、息子は“お父さんが昼間にいる!”って、それだけでもう大喜びで……」
苦笑いしながらそう言った阪口さんだったが、続けてポロリとこう漏らした。
「でも、ぼくの人生、めちゃめちゃ幸せかも。小学生の頃からロボットを作りたいと思いつづけていて、それがいま、仕事になっているんですから」
ロボットアニメの夢を現実に
ロボットに惹かれたきっかけは、テレビアニメ『マジンガーZ』(1972~74年放送)だったという。
「エンディングで、マジンガーZの中はこうなっている、みたいな絵が出てくるんです。毎週、『ああ、こうすればロボットができるんだ』と思いながら見ていました。中学の進路指導の先生にも、高校の進路指導の先生にも『ロボットを設計したいんです』と言いつづけていましたね」
入学した大阪大学では、ロボット研究の第一人者、有本卓教授に師事するつもりだった。しかし有本研究室は人気が高く、学生の受け入れ枠は大変な競争率だった。阪口さんは同期生とじゃんけんで争い、みごとその枠を勝ち取った。産総研の前身の1つ、機械技術研究所に入所後は、最初は自動運転技術の研究に配属されたが、2005年からは念願かない、HRPのグループに移ることができた。
HRPの研究室に入ってまず目に飛び込んできたのは、壁に大きく掲げられた『鉄腕アトム』のポスターだった。「目指す方向はこれなんだな」と阪口さんは思ったという。
 産総研HRPシリーズの歴代ヒューマノイド。左からHRP-2、HRP-3、HRP-4C、HRP-5。
産総研HRPシリーズの歴代ヒューマノイド。左からHRP-2、HRP-3、HRP-4C、HRP-5。
女性型のHRP-4Cのみエンターテインメント分野などでの活躍が期待されているが、そのほかは作業用ヒューマノイドだ ©産総研
「僕らがやっていることは、あくまでも基礎研究なんです。僕らの研究がメーカーに引き継がれて、初めて実用化につながります。自分たちの作ったヒューマノイドがプロトタイプになって、将来、社会で役に立ってくれれば、こんなうれしいことはありません」
阪口さんの目が一瞬だけ、遠くを見る目になる。そして、こう結んだ。
「昨年発表したデモ動画は、建築業界を中心に内外から大きな反響がありました。けれど、5Pの働き場所は建築現場だけではありません。航空機や船舶など、広く大型構造物の製造現場で働くことも念頭に作られています。そのあたりをもっとアピールするためには、5Pの違う仕事ぶりも見ていただく必要があるでしょう。現在、新しいデモ動画の制作に向けて動きはじめているところです」
阪口さんには不屈の意志がある。ロボットアニメ世代よ、逆襲せよ――同世代の隊員は、心の中で密かにそう願った。