カメラ1台で動作計測も精密測位も実現

2020/04/30
カメラ1台で動作計測も 精密測位も実現 世界最高精度の画像計測用マーカー 「LentiMark」
 描かれている模様を画像処理することで傾きや位置を推定できる「視覚マーカー」。このマーカーはロボットの自律動作を支援するツールとしての活用が期待されている。産総研では従来の視覚マーカーの10倍以上も高精度なマーカーを開発。その用途は動作計測や精密測位など多くの可能性を持つ。
描かれている模様を画像処理することで傾きや位置を推定できる「視覚マーカー」。このマーカーはロボットの自律動作を支援するツールとしての活用が期待されている。産総研では従来の視覚マーカーの10倍以上も高精度なマーカーを開発。その用途は動作計測や精密測位など多くの可能性を持つ。
ロボットが道具を扱うための「接点」として
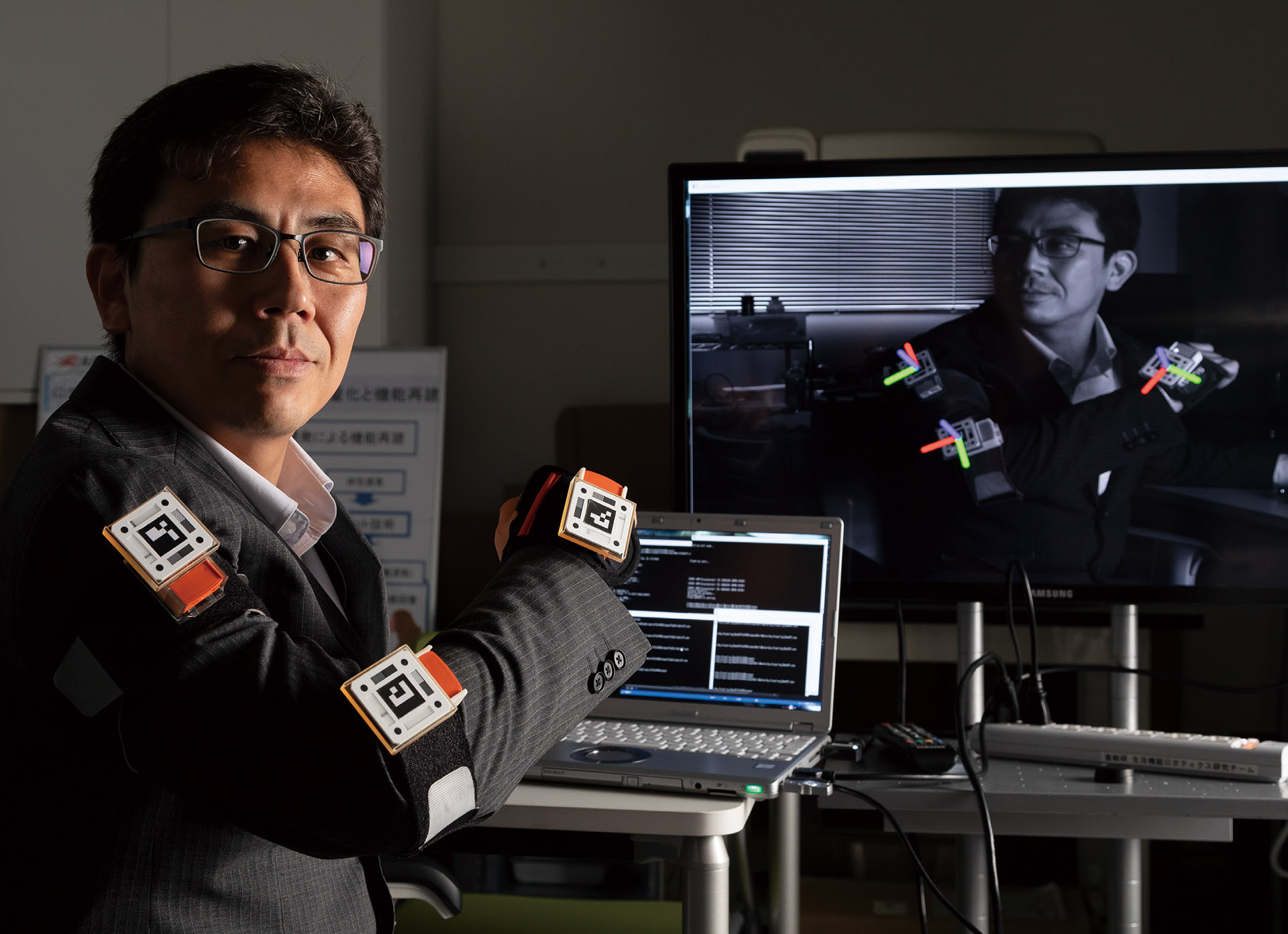
「ロボットの手元を見てください。掴もうとしている電動ドライバーにマーカーが見えますよね?これが、高精度マーカーの『LentiMark』です。このマーカーを手に装着されているカメラで読み取ることで位置や姿勢を計測でき、適切な持ち方で電動ドライバーを掴むことができています」
映像を見ながらそう説明してくれたのは、このマーカーの開発者である田中秀幸だ。たしかに、電動ドライバーに黒い丸や白と黒の縞模様のパターンが配された正方形のプレートがついている。作業しているロボットは、産総研が開発したヒューマノイドロボットHRP-5Pで、電動ドライバーを用いて石膏ボードを壁にビス止めしている。このビスを「まっすぐに」打ち込むことは、自身の身体に感覚がないロボットにとって難しい課題だ。工具の持ち方がほんの少しずれただけでビスが曲がってしまうが、そのずれをロボットは微調整することができない。そのため、手と電動ドライバーの精密な位置合わせにより、ロボットが工具を正確に把持できるようにしないといけないのだ。
「従来の視覚マーカーの精度ではマーカーが真正面に来るような位置合わせができませんでした。この真正面からの計測が可能というところがLentiMarkの強みのひとつです」
LentiMarkは、3分30秒過ぎに登場
新しい発想で計測精度は従来の10倍に
従来の視覚マーカーが正面からの計測に弱いのは、斜めから見るときよりもマーカーのパターンの見かけの歪みが少ないからだ。正方形を斜めから見れば台形として見えるので角度がわかりやすいが、正面からだと形はほとんど変わって見えない。角度の変化に対してマーカーの見た目の変化が少ないことが、うまく計測できない原因となっていた。
「マーカーの正面にカメラが来たときにうまく計測できず、対象の姿勢がブレてしまうのです。対象物の正確な情報がとれなければ、ロボットを安全に制御することができなくなります。私は、どこから見ても正確に計測できるマーカーを作ってこの問題を解決したいと考えました」
この課題に、田中は従来になかった発想で取り組んだ。正面から見たときでも、角度の変化に対してマーカーの見た目の変化が大きくなるようにしたのである。その結果誕生したのが、中央の2次元コードと、それを囲む四隅の参照点、2つのLEAG(Lenticular Angle Gauge)、および2つのFDP(Flip Detection Pattern)によって構成される新しいマーカー、LentiMarkである。
LEAGは縞模様とレンチキュラーレンズを組み合わせた特殊パターンで、見る角度によって黒い線が移動することを利用し、視線の角度を検出するのに用いる。FDPは波型の左右を白黒二色に塗り分けた構造のパターンで、見る角度で白と黒が切り替わることを利用して姿勢の反転を検知する。まず四隅の参照点の画像上での位置関係からマーカーの位置と姿勢を計算し、次にLEAGとFDPでブレを抑える仕組みである。
「この方法によって従来の視覚マーカーの10倍以上の計測精度を実現できました。現在、1台の汎用カメラで位置や姿勢を計測するマーカーとしては、これが世界最高精度です」
■LentiMarkとカメラ
 これがあれば市販のカメラ1台で、高精度な位置情報が得られ、動作計測などもでき、いろいろな応用が考えられる(左下は従来の視覚マーカー)。
これがあれば市販のカメラ1台で、高精度な位置情報が得られ、動作計測などもでき、いろいろな応用が考えられる(左下は従来の視覚マーカー)。
このマーカーがあれば、あとはスマートフォン用のカメラや安価なUSBカメラを用意するだけで、誰でも簡単に高精度な位置と姿勢の計測ができる。
動作計測や精密測位ツールとしての応用も期待
現在、この技術は各種ロボット制御に加え、研究開発の現場におけるさまざまな計測に使われている。宇宙航空研究開発機構(JAXA)は実験衛星に搭載し、太陽光パネルの展開動作の計測に用いている。
このマーカーは複数個を同時に計測できるので、動作計測にも応用可能だ。一般的に動作計測に使われるモーションキャプチャーは、室内に設置した多数のカメラで計測対象につけたマーカーを撮影する必要がある。しかし、このマーカーを使用すればカメラは1台で済む。どのような場所でも簡易に計測し、すぐに対象の動きを定量化できる。
「人や物の動きを見た目だけでなく数値で記録し、計測・解析を簡単にできるようにすることでさまざまな研究開発の高速化、効率化にもつながると考えられます」
また、精密測位への応用も期待される。2019年に柏の葉でマーカーを設置して行った実証実験では、スマートフォンなどでマーカーを撮影した人が、地球上のどの位置に立っているのかを、わずか10cm程度の誤差で把握できた。この精度であれば、GPSが入らない場所での位置情報取得、車椅子や歩行器での外出時や自動走行ロボットが位置を見失ったときなどにも役立つだろう。
今後の課題は、製造コストをどれだけ下げられるか、ということに尽きる。いくら精度がよくても、さまざまな場所に貼って数多く使うマーカーは、コストが見合わなければ使ってもらえない。そのため、低コスト化の努力とともに、マーカーの新たな用途を探しつつ、隙間などに設置しやすい細長い形状のマーカー開発も検討するなど、普及させるための工夫を継続している。
「高精度マーカーを効果的に使える用途は、たくさんあるはずです。私たちにもまだ見えていない世界を皆さんと見つけていきたいと思いますので、まずはぜひ、試してみてください」と田中は力を込める。
人間拡張研究センター
生活機能ロボティクス研究チーム
主任研究員
田中 秀幸
Tanaka Hideyuki