国立研究開発法人 産業技術総合研究所【理事長 中鉢 良治】(以下「産総研」という)情報・人間工学領域 端末交通システム研究ラボ 加藤 晋 研究ラボ長、橋本 尚久 主任研究員らは、平成30年11月19日から福井県吉田郡永平寺町において「ラストマイル自動走行の実証評価(永平寺町)」に係る新たな実証として、1名の遠隔ドライバーが2台の自動運転車両を運用する世界初の遠隔型自動運転の実証を、京福電気鉄道永平寺線の廃線跡地を利用した「永平寺参ろーど」の一部の約2 kmにおいて開始します。
端末交通システムとは、鉄道などの基幹交通システムと自宅や目的地との間や、地域内といった短中距離の移動を補完するラストマイルモビリティーとも呼ばれる次世代の交通システムです。
産総研は、経済産業省および国土交通省の平成30年度「高度な自動走行システムの社会実装に向けた研究開発・実証事業:専用空間における自動走行などを活用した端末交通システムの社会実装に向けた実証」を幹事機関として受託し、実証地域の一つである福井県吉田郡永平寺町、福井県と協力して、ヤマハ発動機株式会社、株式会社日立製作所、慶應義塾大学SFC研究所、豊田通商株式会社などと共に、端末交通システムの研究開発と実証を進めています。
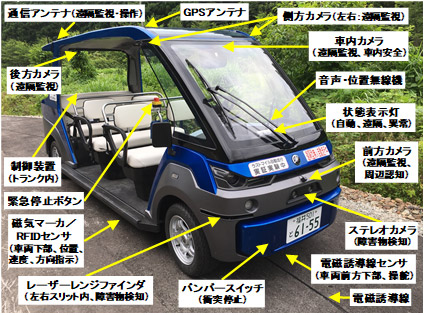
自動運転小型電動カート(スマートEカート:定員6名)
|
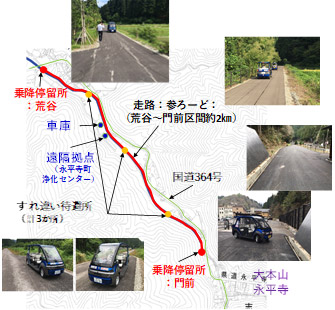
走路ルート及び環境
|
近年、日本の高齢化と過疎化が進み、地方では人手不足や財政難などによってバスや鉄道などの路線の縮小や廃止が行われて移動手段の確保が課題となっています。また、高齢ドライバーの事故も問題となっています。これらの課題に対し、自動運転技術を活用した新たな移動サービスに期待が高まっています。本事業では、公共的な利用を前提とし、地域の活性化などにつながる端末交通システムとして、自動走行技術を取り入れた車両や監視などの交通システムの研究開発を行っています。また、本事業では、研究開発された端末交通システムの社会実装に向けて、平成30年度には実際に端末交通システムの導入が求められている地域の環境で実証評価を行うこととし、小型電動カートと小型バスという乗車人数の異なる車両を用いて地域に応じた実証を行う自治体や地域団体を平成28年度に公募しました。その結果、小型電動カート応用の実証評価を行う地域の一つとして福井県吉田郡永平寺町を選定し、永平寺町、福井県の協力のもとに事業を進めてきました。
永平寺町では、実証環境の特徴から過疎地モデルと分類し、京福電気鉄道永平寺線の廃線跡地の町道(自転車歩行者専用道)である永平寺参ろーどを走路とし、高齢住民、通勤・通学者や観光客の移動手段としての端末交通システムを、歩行者などとの共存空間における自動走行や遠隔監視・操作の技術で実現することにより、少子高齢化地域の活性化を目指した社会実験を行っています。
平成30年3月からは、小型電動カートを用いて、遠隔監視・操作技術と自動走行技術を組み合わせた遠隔型自動走行システムとなる端末交通システムの社会実装に向けた技術実証として、積雪路面での自動走行や通信状態の検証などを進めてきました。また、4月5日からは、1名の遠隔ドライバーが1台の自動運転車両を運用する遠隔型自動走行の実証実験を開始し、4月23日からは、利用者による利用者受容性評価を開始しておりました。
さらに、10月29日からは、国内初の複数台の自動運転車両と管制システムを用いた長期実証実験を開始し、11月30日までの約1カ月間、地域の移動サービスの担い手となりうる事業者として、えい坊くんのまちづくり株式会社と京福バス株式会社が運営をする形で実施をしています。長期実証では、定時ダイヤで自動走行を運行することにより、地域住民の方々や旅行者等に乗車いただき、移動サービスのニーズや受容性の調査を行うと共に、自動運転の安全性や運用性の確認を進めています。走路は、永平寺参ろーどの東古市(永平寺口駅)から志比(門前)までの約6㎞で行っています。また、この長期実証では、遠隔型自動運転での実証は行わず、自動運転のレベル4相当の機能を持った自動運転小型電動カートを用いて、運転席にはドライバーが着座し、自動運転のレベル2の位置づけで実施し、交差点での発進操作等の一部をドライバーが行っています。複数台を運用するため、管制システムを遠隔管制室に設置し、遠隔での監視や待避所でのすれ違いの管制指示を行うなど、移動サービスの実現に向けたシステムの実証を行っており、運営に対する運行事業者としての受容性や事業性の評価も進めています。
今回の実証実験では、世界に先駆けて1名の遠隔ドライバーが2台の自動運転車両を運用する遠隔型自動運転システムを、規制をかけずに行います。実験にあたっては、平成30年10月18日に国土交通省 中部運輸局より、1名の遠隔ドライバーが2台を運用する国内初の遠隔型自動運転システムを搭載した自動車の基準緩和の認定を受けました。また、本認定を基に福井県警察本部、福井警察署による走行審査を11月5日に受け、11月7日に1名の遠隔ドライバーが2台を運用する遠隔型自動運転システムの公道実証実験に係る道路使用許可を受けたことを踏まえ、11月19日から実証実験を開始します。
1名の遠隔ドライバーが2台の自動運転車両を運用する遠隔型自動運転システムの実証実験は、永平寺参ろーどの南側一部区間(荒谷から志比)の約2㎞を走路として行い、遠隔監視・操作装置などを志比浄化センター内に設置して行います。
自動運転小型電動カートには、ヤマハ発動機㈱が開発したゴルフカートをベースに公道走行を可能とした車両を、産総研が改造した遠隔型自動運転を可能とした実験車両を用います。電磁誘導線を用いた自動操舵(そうだ)機能、走路に埋め込んだRFID(Radio Frequency Identifier)タグによる速度制御や位置補正機能、ステレオビジョンやレーザーレンジファインダーによる障害物検知と自動ブレーキ機能、車内外のカメラと車内のマイクによる遠隔でのモニター機能などを有しています。また、慶應大SFC研の開発による遠隔での車両の状態や位置の把握や、運転操作を可能とする遠隔監視・操作装置を通信でつなぐことで遠隔型自動走行を実現しています。
さらに警察庁が策定した「1名の遠隔監視・操作者が複数台の実験車両を走行させる場合の審査の基準」にそって、遠隔型自動運転システムを構築し、安全対策を行っております。走行中に遠隔ドライバーが1台の自動運転車両について、遠隔からの操作を行った場合には、他の自動運転車両の監視・操作が困難となることを踏まえて、自動的に他の車両を安全に停止させ、操作後に2台を同時に再発進できる機能や、追加の遠隔ドライバーが対応できる体制の場合には速やかに他の自動運転車両の運行を再開できる機能等が付加されています。また、遠隔ドライバーは、全ての自動運転車両の周囲及び走行する方向の状況を確認するための映像及び音を同時に監視する必要がありますが、音については、緊急車両のサイレン音を検知し、遠隔ドライバーにどの車両で検知しているかを注意喚起支援する機能を付加しています。さらに、今回の走路は狭いため、自動運転車両はすれ違い待避所を3カ所設置しており、㈱日立製作所の開発による管制システムによって、自動的にすれ違い待避所での通過や待機停止、待機解除発進を行う機能も付加しています。
今回の実証実験による評価を通じて端末交通システムの社会実装が加速され、ドライバー不足対策やコスト削減、需要への柔軟な対応、安全性のさらなる向上など、地域の活性化に資する安心、安全な交通手段の確保や沿道施設の利用促進などが期待されます。