国立研究開発法人 産業技術総合研究所 (理事長: 中鉢 良治、以下産総研) 知能システム研究部門 (研究部門長: 河井 良浩) ヒューマノイド研究グループ(研究グループ長: 金広 文男)中岡 慎一郎 主任研究員が中心となって開発している統合ロボットシミュレーター「Choreonoid(コレオノイド)」が、経済産業省、国立研究開発法人 新エネルギー・産業技術総合開発機構(NEDO)主催の国際的なロボットの競技会・展示会である「World Robot Summit (WRS) 2018」にて実施される「World Robot Challenge (WRC)」の「インフラ・災害対応」カテゴリーの「トンネル事故災害対応・復旧チャレンジ」のシミュレーターとして活用されます。
 |
|
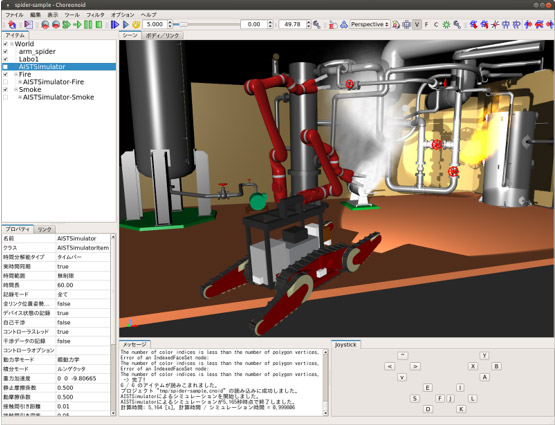
統合ロボットシミュレーター「Choreonoid(コレオノイド)」 |
Choreonoidは、高機能グラフィカルユーザーインタフェースと高速、高精度のシミュレーション性能を有しており、産総研において二足歩行ヒューマノイドロボットHRPシリーズをはじめとする各種ロボットの研究開発に活用されてきました。2011年からはオープンソースソフトウェアとして一般にも公開され、国内外の多くのロボット研究開発機関で利用されています。2015年には経済産業省、NEDOによって開催されたコンピューターシミュレーションによる災害対応ロボット競技会「Japan Virtual Robotics Challenge(JVRC)」において、競技用の公式シミュレーターとして採用され、全12チームによる災害対応競技がChoreonoid上で実施されました。今回上記の実績が評価され、ChoreonoidがWRS2018トンネル事故災害対応・復旧チャレンジのシミュレーターとして活用されるに至りました。
本チャレンジでは、トンネル事故を想定した複雑なタスクが競技内容として計画されており、これによって災害対応ロボットの高機能化を促進するねらいがあります。競技内容はロボットにとっても難しい課題ですが、同時にそれをシミュレーションするシミュレーターにとっても挑戦的な課題となっています。具体的には、クローラー(注1)による走行の精緻なシミュレーションや多量の散乱物の挙動のシミュレーション、さらに、スプレッダーによる車のドアの破壊、車内に閉じ込められた犠牲者、火災・煙の再現、消火ホースを使った放水による消火、ドリルを用いた壁面への穴あけなどのシミュレーションが求められており、現在それらに対応するため産総研が中心となってChoreonoidの改良を進めています。この一環として株式会社ブイエムシー(本社: 名古屋市、代表取締役: 永瀬 純)と共同でAlgoryx Simulation AB(本社: スウェーデン、CEO: Kenneth Bodin)が開発する物理エンジン(注2)「AGX Dynamics」のChoreonoidへの実装を行い物理シミュレーション機能の充実を図っています。
Choreonoidは2018年度から順次開所予定の「福島ロボットテストフィールド」に設置される模擬プラント用ロボットシミュレーターや、現在研究・開発が進むImPACT「タフ・ロボティクス・チャレンジ」の評価用シミュレーターとしても採用されており、AGX Dynamicsを実装したChoreonoidは今後災害対応ロボット開発に関する汎用シミュレーターとしての活用が期待されています。
注1:クローラーについて
クローラーはキャタピラー™または無限軌道とも呼ばれ、軟弱な地形、凹凸の激しい地形など悪路での走行性能を向上させるために、履板を、前後輪を囲むように一帯に接続した機構です。建設機械に多く用いられており、災害対応ロボットの移動機構としても一般的なものとなっています。クローラーの構造や環境との接触状況は車輪型や脚型の移動機構と比べて複雑になるため、これまでクローラーの精緻なシミュレーションを実時間に近い速度で実行できるロボットシミュレーターは実現されていませんでした。
注2:物理エンジンについて
シミュレーション内で生じる物理現象・挙動を計算するためのソフトウェアを「物理エンジン」と呼びます。これは物理運動シミュレーターにおいて、シミュレーション速度、正確性を左右する重要な部品となるものです。
<参考URL>
・World Robot Summit
http://worldrobotsummit.org/
・Choreonoid公式サイト
http://choreonoid.org/
・株式会社ブイエムシー
http://www.vmc-motion.com/
・Algoryx Simulation AB
https://www.algoryx.se/
・福島ロボットテストフィールド
https://www.pref.fukushima.lg.jp/sec/32021f/test-field.html
(福島県ホームページより)
・革新的研究開発推進プログラムImPACT「タフ・ロボティクス・チャレンジ」
http://www.jst.go.jp/impact/program/07.html
(内閣府ホームページより)