 |
|
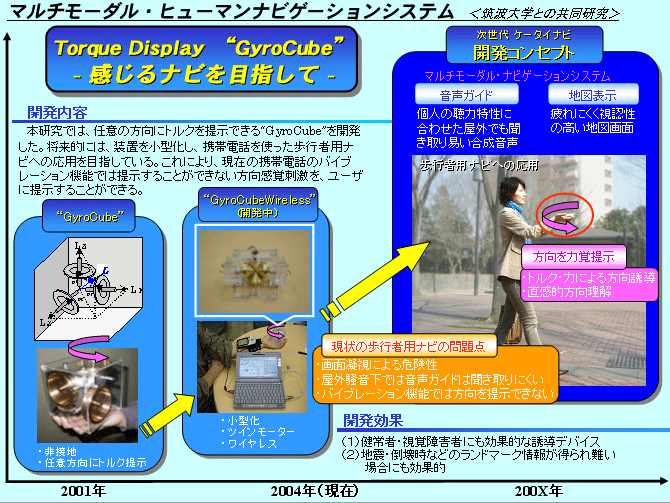
図1 マルチモーダル・ヒューマンナビゲーションシステム |
近年、GPS機能が搭載された携帯電話機が発売されるなど、「ヒューマンナビ」「ウォーキングナビ」「ヒトナビ」などと呼ばれるヒト用の携帯型ナビゲーション環境が整ってきている。ヒトナビを利用する場合にも、歩きながら地図を読む時の視認性の問題や屋外・雑踏における音声ガイドの聴取の問題などがある。
特に、今後利用が増えると考えられる観光ナビゲーションにおいては、目的地に到達することだけが目的ではなく、店舗のショーウィンドウや仲間との会話を楽しみながらナビを利用するシーンも増え、視覚情報および聴覚情報に頼ったナビでは十分でない場合がある。
そこで、本研究では、力覚感覚の直感的な方向理解に着目し、ディスプレイや音声ガイドによる従来の視覚・聴覚情報に加えて、進行すべき方向を力覚感覚で提示するマルチモーダル・ヒューマンナビゲーションシステムの開発を目標とし、力覚提示デバイス”GyroCube”を開発した。
地図を用いたナビの場合、地図空間と現実空間とを照合した後、歩行しながらもメンタルマップ上の地図を意識しながら歩行することになる。そのため、地図を読み解き、記憶の地図と照合する能力が必要であり、個人差、年齢差が生じ易い。
音声ガイドを用いたナビの場合、交差点・分岐点に差し掛かったならば進むべき方向の指示が呈示される。必要な場所で必要なタイミングに音声ガイドが行われるため、地図によるナビとは異なりナビ情報を歩行中に意識する必要はなく、音声ガイドが始まったならば注意を傾ければよい。歩行に伴う観光、ウィンドショッピング、思索などの本来の目的に専念することができ、視野の確保が安全な歩行を提供してくれるが、雑踏や交通騒音によって聴取が低下すること、公共の場では音声ガイド自身が他人にとって騒音になり得る。
現在、ナビゲーションに効果的な力覚情報の呈示の仕方は明らかになっていないが、力覚呈示デバイスGyroCubeを用いた先行研究[8]の結果からヒューマンナビゲーションに効果があげられると推測される。力覚情報の分かり易さは具体的な呈示方法に依存するが、親が子の手を引くように方向呈示における力覚情報は直感的で分かりやすいと考えられる。力覚情報を用いてナビゲーションが実現できれば、歩行に必要な視覚・聴覚の情報処理の負荷が低減されるし、公共の場でのマナーモード的ナビゲーションが実現されると考えられる。
以上、各感覚情報を用いたナビは長所・短所を含んでおり、提示すべき情報ごとに各感覚情報を選択的・補完的に利用すべきであると考えられ、本報告では、マルチモーダル・ヒューマンナビゲーションシステムのうちの、力覚感覚提示デバイス”GyroCube”の開発について報告する。
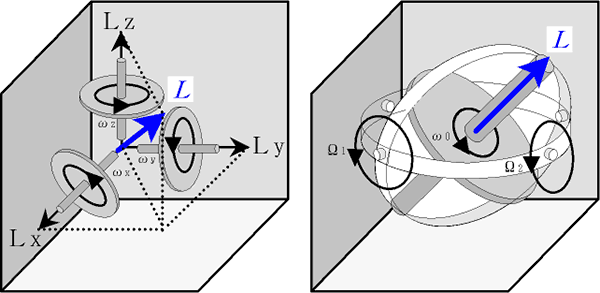
トルク提示デバイスとして無重力空間での筋肉トレーニングへの利用が知られているが、このジャイロスコープ型の方法では回転軸と回転方向に直交した方向にしかトルクを提示できない。しかし、ナビゲーションなどに用いるためには任意の方向にトルク提示できる必要がある。これに対して、本提案方法である合成角運動量ベクトル微分方式では、任意の方向に自在にトルクを提示することを可能にしており、その動作原理を以下に示す。
トルク感覚を発生させる方法として、慣性モーメントを持った回転体の回転数を加速・減速する方法と、回転体をその回転軸と直交する軸周りに回転させる方法がある。どちらも時間的に角運動量ベクトルを変化させることでトルクを発生させる方法であり、機構学的見地から以下の回転子姿勢制御型(以降ジャイロ型と呼ぶ)と合成角運動量ベクトル微分型(以降本方式と呼ぶ)の2つに大きく分類される(図2)。
まず、ジャイロスコープを用いた回転子の姿勢を制御するジャイロ型を説明する。ジンバル構造を用いて一定角速度ω0で回転する回転子の姿勢を2つのジンバル軸周りの回転角Ω1、Ω2を変化させてトルクを発生させることができる。慣性モーメントIの回転体を角速度ω0で回転させた時の角運動量L0は、
L0 = I ω0
と表わされる。このとき、トルクが発生する方向を考慮して、角運動量ベクトルLを角速度ωで回転させたとき発生するトルクベクトルτは
τ = ω ×L 、where ω = d Ω/d t
で表わされる。
次に、先行研究において著者らが提案した合成角運動量ベクトルの時間変化を制御する本方式を説明する。x軸、y軸、z軸に固定された3つの回転子の回転数 ωx、ωy、ωz を独立に制御して、それぞれの回転子が発生する角運動量を合成することで任意の方向に角運動量ベクトルを発生することができる。これを適切に制御すれば任意の方向にトルクを発生させることができる。角運動量ベクトルLを変化させた時に発生するトルクは以下のように表される。
各x、y、z軸周りに角速度ωiで回転する角運動量Liは、各軸周りの慣性モーメントをIiとすると、
Li = Ii ωi、i= x, y, z
と表わされる。これらの各軸周りの角運動量から構成される合成角運動量ベクトルは、x、y、z軸方向の基本ベクトルをi、 j、kとすると、
L = Lxi +Ly j +Lzk
と表わされる。この合成角運動量ベクトルの時間微分が発生するトルクベクトルτである。
τ = d L/d t
x、y、z軸方向の角速度の比ωx:ωy:ωzを変えることで任意の方向に角運動量ベクトルの発生方向を制御することができる。著者らが先行研究で開発したGyroCubeは、慣性質量を持ったモータを加減速させた時に伴う角運動量の変化によってこれを実装している。本手法は制御が容易であり、変化に富んだ3次元力覚感覚を呈示できる利点がある。
 |
|
|
|
図2 動作原理
|
|
(左) 合成角運動量ベクトル微分型(本提案方式)
|
(右)回転子姿勢制御型(ジャイロスコープ方式)
|
本力覚提示デバイス”GyroCube”の利点を表1にまとめる。
表1 特徴比較表