国立研究開発法人 産業技術総合研究所【理事長 中鉢 良治】(以下「産総研」という)ロボットイノベーション研究センター【研究センター長 比留川 博久】は、一般財団法人 日本品質保証機構【理事長 小林 憲明】、株式会社 アプライド・ビジョン・システムズ【代表取締役 高橋 裕信】、学校法人 愛知医科大学【理事長 三宅 養三】、一般財団法人 日本自動車研究所【代表理事・研究所長 永井 正夫】、独立行政法人 労働者健康安全機構 労働安全衛生総合研究所【所長 豊澤 康男】、国立大学法人 名古屋大学【総長 松尾 清一】、一般社団法人 日本福祉用具評価センター【理事長 田中 理】、一般社団法人 日本ロボット工業会【会長 橋本 康彦】、一般社団法人 日本福祉用具・生活支援用具協会【会長 木村 憲司】と分担して、「ロボット介護機器開発ガイドブック」と関連文書を作成し、9月10日より介護ロボットポータルサイト(http://robotcare.jp/)で無償配布を開始する。
本ガイドブックは、ロボット介護機器の開発者を主たる対象としてロボット介護機器を開発するための安全設計・試験法、被介護者や介護者の生活機能の目標を含めた設計方法などを体系的にまとめた文書である。ガイドブック本体に加えて、「ロボット介護機器開発のための安全ハンドブック」、「ロボット介護機器実証試験ガイドライン」、「倫理審査申請ガイドライン」、「ロボット介護機器開発導入指針」からなる関連文書も同時に公開する。これらの文書がロボット介護機器の開発現場で利用されることで、より安全で有効なロボット介護機器の開発が促進され、被介護者の自立支援や介護者の不足といった介護現場における課題の解決の一助となることが期待される。
全国における要介護(要支援)認定者数は、2018年5月末現在で646.0万人に達するなど増加の一途をたどり、2025年には介護人材が37.7万人不足すると推計されている。また、2017年度の介護保険給付費の総額は9兆4,328億円(厚生労働省介護保険事業報告)で、2016年度の医療費約41兆円(厚生労働省 概算医療費の年度集計)の1/4程度の規模に膨らんできている。
これらの問題の解決を図るため、高齢者の自立支援と介護者の負担軽減を目指して、ロボット介護機器の開発が行われている。しかし、ロボット介護機器を開発するための安全設計・試験法、被介護者や介護者の生活機能の目標を含めた設計方法などをまとめた文書はなく、開発者は試行錯誤で開発を進めなければならないため、これらの内容を網羅する文書の策定が求められていた。
産総研は、国立研究開発法人 新エネルギー・産業技術総合開発機構(NEDO)の「生活支援ロボット実用化プロジェクト」(2009~2013年度)に参画し、生活支援ロボットの安全検証試験方法の開発や安全認証スキームの策定、生活支援ロボットの国際安全規格ISO 13482の発行に貢献してきた。
今回、関連機関と共にこれまでの研究開発で培ってきたロボットを安全に作る技術的知見をロボット介護機器に適用し、安全で有用なロボット介護機器を作る技術として被介護者や介護者の生活機能の目標を含めた設計方法をまとめ、ロボット介護機器の開発方法を体系的にまとめた文書の世界初となる策定を目指した。
なお、本ガイドブックと関連文書は、経済産業省の「ロボット介護機器開発・導入促進事業」(2013~2014年度)と、経済産業省の補助事業として実施された国立研究開発法人 日本医療研究開発機構(AMED)の「ロボット介護機器開発・導入促進事業」(2015~2017年度)において作成した。
ロボット介護機器は、被介護者の生活をよりよくするための機器として、また介護者への負担が少ない介護を実現するための機器として開発する必要がある。また、機械的な安全面により一層注意した開発も求められる。そこで今回、被介護者の生活機能の目標の達成に着目した開発手法をまとめてロボット介護機器ガイドブックとして公開する。また、本ガイドブックの公開に合わせ、ロボット介護機器開発のための安全ハンドブック、ロボット介護機器実証試験ガイドライン、倫理審査申請ガイドライン、ロボット介護機器開発導入指針といった関連文書も公開する。
(1)ロボット介護機器開発ガイドブック
本ガイドブックは、ロボット介護機器の開発者を主な対象として、開発の方法論を開発プロセスに沿ってまとめたものである。ロボット介護機器を開発するには、人に対する影響を明確にすること、ロボットとしての安全性を実現することなど、多様な観点からの検討が必要であるが、これまでこれらに必要な知見をまとめた文書は存在しなかった。
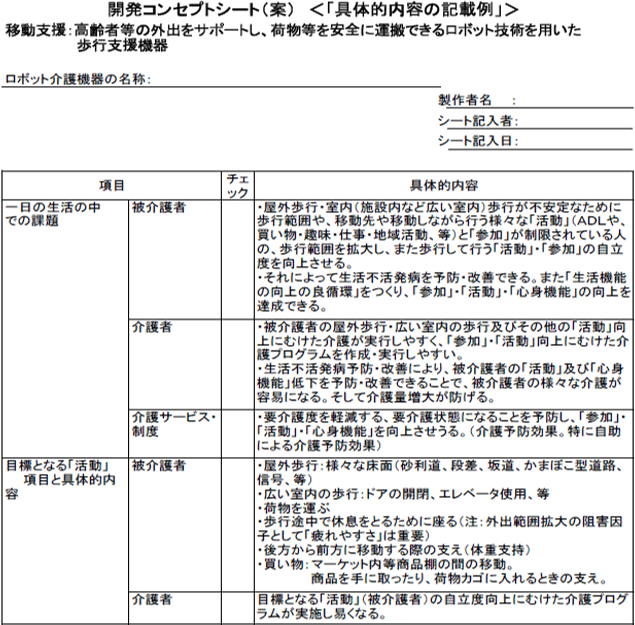
開発プロセスは、開発コンセプトを明確にするステップ、力学モデルに基づいて仕様を設計するステップ、リスクアセスメントをするステップ、ロボットの設計と製作をするステップ、安全試験をするステップ、実証試験をするステップの6つのステップから構成される。開発コンセプトを明確にするステップでは、「人」に対する影響をプラス・マイナスの両面から明確にする。そしてそれを実現するためにどのような機械的要件を満たすものを開発するかを明確にする。力学モデルに基づいて仕様を設計するステップでは、人間の体型や機能・行動などを高度に再現したデジタルヒューマンモデルを用いた人間中心設計の方法について記載する。
開発コンセプトシートの例を図1に、力学シミュレーションの例を図2に示す。図2は、非装着型移乗支援機器について、被介護者を持ち上げるための回転動作と並進動作の最適な組み合わせの設計をした例である。具体的には、回転させてから持ち上げるのか、持ち上げてから回転させるのかといった動作について、利用者に加わる負荷力を最小にするような動作を最適化計算により求めている。
 |
|
図1 開発コンセプトシートの例 |
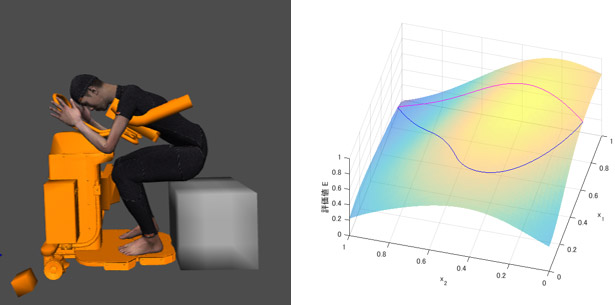 |
図2 力学シミュレーションによる動作軌道の最適設計
グラフの平面の2軸は、ロボットの2関節の角度を表し、縦軸は利用者に加わる負荷力を表す。
2つの軌道に対して、どちらの軌道の方が利用者に加わる負荷力が小さいかを評価している。 |
リスクアセスメントのステップでは、リスクアセスメントのひな形シートの概要、リスクアセスメントの実施手順に加えて、本質安全設計支援ツールの概要を紹介する。ロボットの設計と製作のステップでは、設計の際に参照すべき各重点分野のロボット介護機器の性能基準、タイプ別の安全要求事項をまとめた。安全試験のステップでは、安全検証手法決定のための参照規格と試験法リストや、代表的な安全試験方法を紹介している。そして実証試験のステップでは、実証試験ガイドライン、実証試験を実施するための倫理審査申請ガイドライン、ロボット介護機器の有用性を定量的に評価するための効果評価ツールを紹介している。
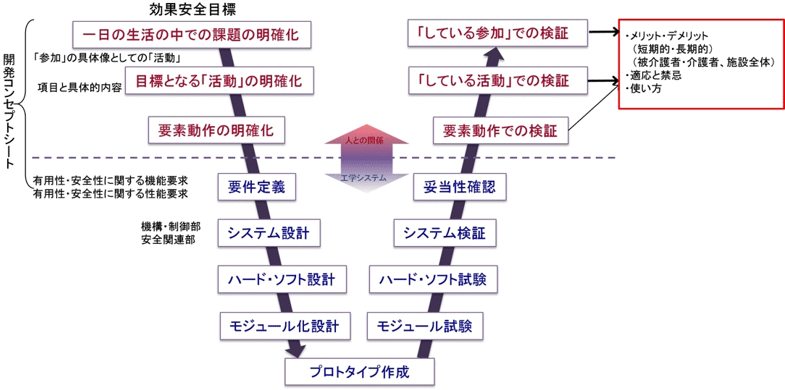
以上の開発プロセスをV字モデルとしてまとめたものを図3に示す。V字モデルでは、同じレベルの左側が設計のステップ、右側がその検証に対応する。生活機能の課題から出発して、目標となる活動を明確にし、それを機械の要件定義に帰着させて機械を設計し、機械の検証を下位レベルから順に実施して、最終的には生活のレベルである“活動”と“参加”で検証する。
 |
|
図3 ロボット介護機器の開発のV字モデル |
以上に加えて、本ガイドブックではロボット介護機器の各重点分野の標準規格の策定状況、ロボットを開発・導入する際の指針を記載している。
(2)関連文書
1)ロボット介護機器開発のための安全ハンドブック
ロボット介護機器開発のための安全ハンドブックは、機器の安全性を検証する手法をまとめたものである。リスクアセスメントの実施方法の詳細、ロボット介護機器への生活支援ロボットの安全要求(ISO 13482)の適用事例、安全性評価項目、電気安全、EMC、ペースメーカーへの影響の確認手法、安全制御回路の評価ガイド、腰部装着型機器の腰部負担の基準、人体接触時の機械的刺激に関する評価基準、総合停止性能試験、非装着型移動支援機器の安定検証試験、屋外移動支援機器の安定検証試験などからなり、付属書と合わせて450ページの文書である。
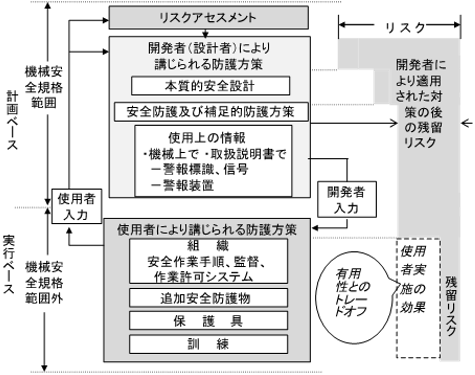
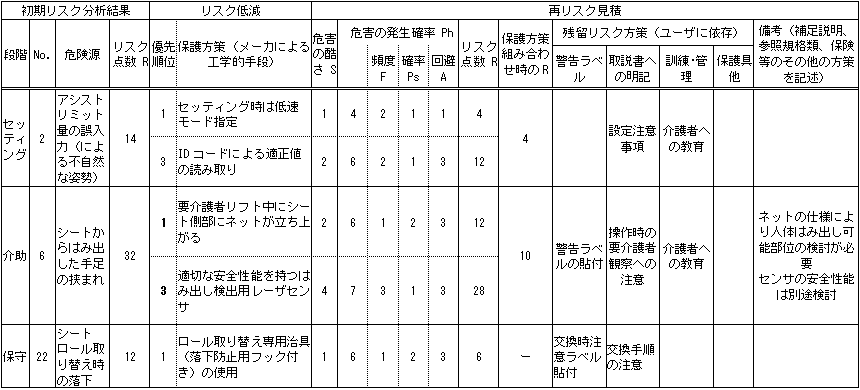
本ハンドブックは、重点5分野における8種類のロボット介護機器を開発する事業者が、ロボットの安全設計、安全検証計画立案、安全試験までの一連の流れを進めるための文書である。ロボットの安全設計は、リスクアセスメントに基づき、許容できないリスクに対しては開発者が防護方策を施し、防護方策を施した後に残った残留リスクに対しては使用者が運用による防護方策を取る。以上のリスク低減プロセスの詳細とリスク低減効果の再評価の例を図4に示す。
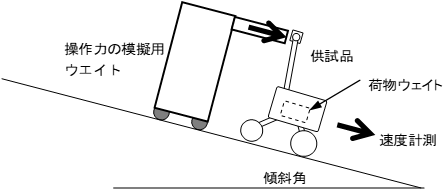
安全検証計画と安全試験については、さまざまなロボット介護機器における20以上の項目に関する安全試験方法や検証方法を掲載した。例えば、屋外移動支援機器は、下り坂で速度を抑える機能を備えていることが多いが、この機能を備える機器が安全上求められている要求事項の範囲にあるかどうかを試験する必要がある。そこで本ハンドブックでは、下り坂での速度の上昇によって介護者や被介護者が危害を受けないような機器の開発を実現できるよう、屋外移動支援機器の斜面における速度抑制効果の試験方法と試験装置を掲載している(図5)。これは、ロボット介護機器特有の安全試験方法の例であり、これらと併せてロボット介護機器にも応用可能な安全試験方法についても記載している。
 |
|
図4 機器開発者と使用者によるリスク低減プロセスとリスク低減効果の再評価の例 |
 |
|
図5 屋外移動支援機器の速度抑制効果を検証する試験装置の例 |
2)ロボット介護機器実証試験ガイドライン、倫理審査申請ガイドライン、ロボット介護機器開発導入指針
ロボット介護機器実証試験ガイドラインは、ロボット介護機器の開発プロセスにおける実証実験の位置づけや実証試験で明らかにすべきこと、実証試験の進め方などについてまとめている。また、実証試験をスムーズに進行するための具体的なポイントについても列挙した。
倫理審査申請ガイドラインはロボット介護機器の実証試験をするための倫理審査申請の準備、被験者保護などの留意すべき事項、実証試験の計画・実施に関する要領をまとめた。ロボット介護機器開発導入指針は、「よくする介護」の物的手段としてロボット介護機器を位置づけて、その活用のポイントや、ICF(国際生活機能分類)に基づいて人に対する影響をみる方法などについてまとめた。
今回作成したガイドブックを利用して、ロボット介護機器などの開発を支援していく予定である。また、関連して開発した支援ツールの普及を図るとともに、ロボット介護機器の国際標準化に貢献していく。