独立行政法人 産業技術総合研究所【理事長 野間口 有】(以下「産総研」という)知能システム研究部門【研究部門長 比留川 博久】サービスロボティクス研究グループ 松本 吉央 研究グループ長、尹 祐根(ゆん うぐん) 研究員らは、将来の安全認証を考慮して、上肢に障害のある人向けの小型軽量ロボットアーム(Robotic Arm for Persons with Upper-limb Disabilities 以下「RAPUD」という)を開発した。
RAPUDは、アームとハンド(把持部分)を合わせて7自由度、可搬重量(保持、運搬できる物体の重量)0.5 kg、全体重量約6 kgのロボットアームである。操作時におけるユーザーの視野を広げ、アームによる挟み込み部分(ジョイント箇所)を減らすためにブロック連続体を使った直動伸縮機構を採用した。また、関節の動きを測るセンサーの2重化や、高信頼性通信の導入など、将来の安全認証を考慮して設計した。さらに、ユーザーが購入意欲を持てるように、低コスト化を考慮した。
これまで介助者に依存していた上肢に障害のある人が、自分の意思で操作できる小型軽量ロボットアームとしての利用が期待されるため、現在、想定ユーザーである筋ジストロフィーや頸椎損傷を負った人たちによる、RAPUDの評価実験を進めている。
本ロボットアームは、2009年9月29日~10月1日に東京ビックサイトで開催される国際福祉機器展の産業技術連携推進会議 医療福祉技術分科会ブースにて、また、2009年10月15日~16日に産総研つくばセンターで開催される産総研オープンラボにおいて産総研産業変革イニシアティブの成果として展示される予定である。

テーブルに取り付けられたRAPUD
|

電動車いすに取り付けられたRAPUD
|
|
写真1 開発した「RAPUD」
|
経済産業省は、ロボット技術の高度化を通じた生産性と生活の質の向上を目的として、ロボット・新機械イノベーションプログラムを推進している。2007年7月には、次世代ロボット安全性確保ガイドラインをとりまとめ、現在もロボット産業政策研究会を組織し、生活支援ロボット等の実用化に向けた取り組みを行っている。
生活支援分野におけるロボット技術は、大きな市場に発展する可能性を持つ。そのような生活支援ロボット産業の発展が望まれているが、単に試作するだけではなく、想定されるユーザーにも実際に開発に参加してもらい、ユーザーが満足する性能を備えたシステムを開発するとともに、ユーザーが購入意欲を持てる価格にしなければ産業化を実現することはできない。また、将来の安全認証を視野に入れ安全性にも配慮する必要がある。
産総研では、生活支援分野で利用できるロボット技術の研究を進めている。特に、ユーザーが求める多様なサービスを展開するロボットシステムを実現するために、ロボットや機能部品をモジュール化し、モジュールの組み合わせでユーザーの要求に応えることが可能な、カスタムメード型のロボットシステム構築のために、「ロボットの開発基盤となるソフトウエア上の基盤整備」プロジェクト(2002-2004年)の中で、RTミドルウエアの開発を進めてきた。
また、産総研が2006年度から3ヵ年計画で実施した産学官連携プロジェクト 産総研産業変革イニシアティブの「ユーザ指向ロボットオープンアーキテクチャの開発(以下「UCROA」という)」では、2010年に実用化が可能で大きな市場が期待できる、次世代ロボットのプロトタイプの開発を通じて、再利用可能な基盤技術の組み合わせにより、ユーザーの仕様に応じたロボット製品が開発できることを社会に示すことを目標にしている。RAPUDは、UCROAで開発する3つのプロトタイプロボットの1つであり、対人サービスロボットの実用化研究の一環として開発された。なお、UCROAで開発された、3つのプロトタイプロボットの成果は2009年9月28日より下記のホームページで公開している。
(http://unit.aist.go.jp/is/main/initiative/initiative_j.html)
今回の具体的な開発ターゲットは、上肢に障害のある人が自分自身で操作する生活支援用小型軽量ロボットアームとした。産業化が可能な水準の価格設定を開発目標とし、安価な部品を開発するとともに、既存の技術を統合したシステム開発を目指した。
RAPUDは、産総研で研究開発してきた小型軽量ロボットアーム設計技術、安全・信頼性技術、小型CPUボード技術、3次元視覚技術、操作インターフェース技術、RTミドルウエア等 のRT(ロボットテクノロジー)基盤技術を利用したユーザー指向ロボットオープンアーキテクチャに基づき効率良く開発された。
(1)小型軽量ロボットアーム設計技術
リスクアセスメントの結果から、肘回転関節の代わりに直動伸縮機構を採用し、服や物などがジョイント部分に挟み込まれるリスクを減らすとともに、外装に鋭角部分が無い適切な形状を採用することにより、高い安全性を確保した。また、直動伸縮機構を樹脂ブロックの結合により構成することで小型軽量のロボットアームを実現した。RAPUDはアームとハンドを合わせて7自由度を持ち、高さ約75 cm、全長40~100 cm、可搬重量0.5 kg、全体重量約6 kgである。小型軽量であるため、ユーザーの使用状況に合わせて、ワンタッチでRAPUDの取り付け、取り外しができる。ベッドサイドに取り付けられたRAPUDを電動車いすへ付けかえるといったことが簡単にできる。
(2)安全・信頼性技術
開発の各段階でリスクアセスメントを行い、各種センサーの2重化、安全認証取得済み通信モジュールの採用、分散型制御モジュール、安全リレーモジュールの開発などによって高い安全性が確保されている。
(3)小型CPUボード技術
組み込み機器用CPUを採用し、LAN、USB、シリアルポート、デジタル入出力など各種の入出力インターフェースを実装した、名刺サイズのロボット用小型省電力高性能CPUボードを開発した。
(4) 3次元視覚技術
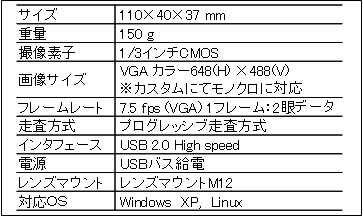
アームなどに取り付け可能な小型ステレオカメラと、注視した物体を把持するための位置・姿勢を検出するRTコンポーネントを開発した。
|
表 産総研産業変革研究イニシアティブで開発された小型ステレオカメラの仕様
|
 |
 |
小型ステレオカメラを利用した注視物体の自動把持デモンストレーション
(ロボットアームは産業用ロボットを使用)
|
(5)操作インターフェース技術
小型ジョイスティック、オートスキャン型入力パネルとシングルスイッチ、汎用キーパッドなどによりRAPUDを簡単に操作できるだけでなく、ユーザーの要望に合わせてカスタマイズ可能な操作インターフェースを開発した。
(6) RTミドルウエア
今回の各開発要素はRTミドルウエア上で動作するコンポーネント、すなわちRTコンポーネントとして開発したため、柔軟なカスタマイズが可能である。
ユーザーによる操作インターフェースを含むRAPUDの操作評価実験は、独立行政法人 国立病院機構 下志津病院と日本医療科学大学 木之瀬 隆 教授の紹介による上肢に障害のある人たち(筋ジストロフィーや頸椎損傷など)の協力により実施した。操作評価実験結果は、開発にフィードバックされ、RAPUDの改良に利用された。現在も操作評価実験は継続されており、RAPUDの実用化に向けたさらなる改良に利用している。
|
写真2 生活支援用ロボットアームを車いすに取り付け
ペットボトルを掴むための操作をしている様子
|
 |
ペットボトルを把持するデモンストレーション
|
今後は、実際のユーザーとのコミュニケーションを通して、さらに信頼性と使いやすさを高めて、製品として普及させていきたい。また、RAPUDを1つの部品として、移動ベース、カメラ、マイクなどのモジュールを組み合わせ、テーブル上や床に落ちたものの拾い上げ、スイッチ操作など、個別の要求に対応でき、拡張・発展も容易なシステムへと展開したい。
ロボットアームは物理的な接触を伴うために事故リスクをゼロにすることができず、売り切りの製品として市場に出すことは困難である。専門家の指導の下で操作訓練を行い、利便性とリスクとを見極めて利用可否の判断を行うといった、運用面(ソフト面)でのバックアップが必要である。そこで、上肢に障害のある人に被験者としての協力を得つつ、作業療法士などの専門家との連携により、運用面での技術開発も継続して行く予定である。
産総研技術移転ベンチャーであるライフロボティクス株式会社にRAPUDに関する多くの知的財産権が技術移転され、RAPUD販売の実現を目指している。また、高信頼通信については、産総研ベンチャー開発センターが推進するタスクフォースにおいて、ロボットシステムの共通プラットフォームとして事業化に必要な技術開発とビジネスプランの策定・検証を行っている。さらに小型CPUボード、小型ステレオカメラは、既に他社から製品化されており、さまざまな分野で数多くのロボットに採用されている。