独立行政法人 産業技術総合研究所【理事長 吉川 弘之】(以下「産総研」という)知能システム研究部門【部門長 平井 成興】の原田 研介 研究員らは、手足の協調による『働く人間型ロボット』HRP-2プロメテ(身長154cm、体重58kg、腰2軸を含む30自由度)の歩行機能・作業機能の拡大に成功した。具体的には、「片手で手摺を掴んで体を支えながら大きな段差を上がる」、「重い物体を押す」、「机に手を突いて体を支えながら作業をする」、「四つん這いになって狭隘部を潜る」等の動作が可能になった。
従来の人間型ロボットは、二本足によって歩行する、二本足によって体を支えながら作業する動作を基本としていたが、本研究では体を支えるために手を積極的に利用し、ときとして三本足、ときとして四本足で、歩行機能および作業機能を拡大する方法を開発した。人間型ロボットの二足歩行動作は、多くの場合ZMPと呼ばれる指標を用いて安定化制御が実現されているが、ZMPは原則として全ての接触点が平面上にないと有効な指標とはならなかった。本研究ではZMPの概念を支持点が同一平面上にない場合に拡張した「一般化ZMP」と呼ばれる指標を考案し、手で体を支えながらの動作を実現した。
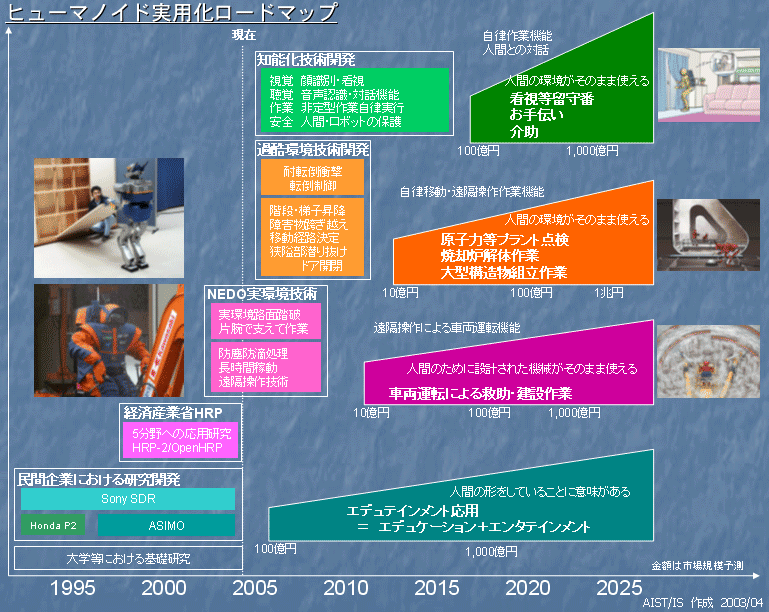
産総研知能システム研究部門では、働く人間型ロボットの実用化を目指した「ヒューマノイド実用化ロードマップ」(図参照)を作成し、その第一段階として、「普通の人間が行けるところならばどこにでも行ける人間型ロボット」の実現に向けた研究を行っている。具体的には、「でこぼこ道でも歩ける」、「転んでも壊れない」、「転んでも起き上がれる」、「手で体を支えながら歩行できる」、「狭いところは潜り抜けられる」、「小さなものは跨ぎ越えられる」、「ドアの開閉ができる」人間型ロボットの実現を目指している。今回の成果は、その一部を実現したものである。
今後は、滑り易い路面上の歩行技術、視聴覚機能を備えた人間型ロボットの開発を行い、人間型ロボットのさらなる機能向上を図る計画である。
本研究は、独立行政法人 新エネルギー・産業技術総合開発機構【理事長 牧野 力】(以下「NEDO技術開発機構」という)の基盤技術研究促進事業「実環境で働く人間型ロボット基盤技術の研究開発(2002~2006年度)」【プロジェクトリーダー 谷江 和雄 産総研 評価部 首席評価役】、および産総研の分野別戦略を実現するための予算「ヒューマノイド・ロボット型知能ブースタープラットホーム開発(2003~2005年度)」の一環として実施された。

片手で手摺を掴んで大きな段差を上る様子 |

四つん這いで狭隘部を潜る様子
|
 |
|
図 ヒューマノイド実用化ロードマップ
|
本田技研工業株式会社【取締役社長 福井 威夫】(以下、「本田技研」という)のASIMO、ソニー株式会社【会長兼グループCEO 出井 伸之】のQRIO、 3月に発表されたトヨタ自動車株式会社【代表取締役社長 張 富士夫】のロボット等、近年人間型ロボットの研究開発が盛んに行われている。また、経済産業省は今月始めに次世代ロボットビジョン懇談会の報告書を発表し、少子高齢化対策、安心・安全で便利・ゆとりのある社会の構築に向けたロボットの役割を示し、2025年における次世代ロボットの市場規模を7.2兆円と予測している。
産総研知能システム研究部門では、次世代ロボットの最終形態の一つになることが期待されている人間型ロボットの実用化を目指した「ヒューマノイド実用化ロードマップ」を作成しており、本研究はその最初のマイルストーンとしている「普通の人間が行けるところならばどこにでも行ける人間型ロボット」の研究開発の一環として行った。人間型ロボットは、我が国が絶対的な国際優位性を持っている技術であるが、短期的には市場が見えていないため大規模な投資を継続することは容易ではない。本研究は、人間型ロボットを早期に実用化し、我が国の国際優位性を失わずに産業化することを目指して行っているものである。
経済産業省は、1998年度から5ヵ年計画で「人間協調・共存型ロボットシステムの研究開発(Humanoid Robotics Project、以下「HRP」という)」【プロジェクトリーダー 井上 博允(当時東京大学教授、現在日本学術振興会)】を推進した。HRPは、NEDO技術開発機構から委託を受けた財団法人 製造科学技術センター(MSTC)【理事長 亀井 俊郎】を管理法人として、産総研との共同研究により実施された。
HRPは前・後期から成り、前期2年間で研究の共通基盤となるプラットフォーム(人間型ロボットHRP-1、遠隔操作コックピット、仮想ロボットプラットフォーム)を開発した。これを用いて、後期3年間では5つの応用分野【(1)対人サービス分野、(2)ビル・ホーム管理サービス分野、(3)屋外共同作業分野、(4)産業車両等代行運転分野、(5)プラント保守分野】の応用研究を推進した。HRPが目指したのは、『働く人間型ロボット』の実現である。
今回実現した動作機能は、HRPの研究開発の一環として川田工業株式会社【代表取締役社長 多田 勝彦】が中心となって開発したHRP-2プロメテ(身長154cm、体重58kg、腰2軸を含む30自由度)を用いて実現した。HRP-2を開発するにあたってはHRP-1の製作を担当した本田技研が独自に開発した技術を本田技研の特許権を実施することにより利用している。また、制御ソフトウェアの開発の一部においても、同様に本田技研が独自に開発した技術を同社の特許権を実施することにより利用している。
HRP終了後、NEDOは2002年度から基盤技術研究促進事業「実環境で働く人間型ロボット基盤技術の研究開発」を5年計画で開始、産総研は2003年度から分野別戦略を実現するための予算「ヒューマノイド・ロボット型知能ブースタープラットホーム開発」を開始し、本研究はこれらの研究プロジェクトの一環として実施された。
スフィンクスが出した「朝は四本足、昼は二本足、夕方は三本足で歩くものは何だ?」という謎々の答である人間は、通常は二本足で歩行しているが、階段を昇降するときに手摺に掴まったり、杖をついて歩いたり、茶室のにじり口を潜るときには四つん這いになったりする。また、手を机に突いて机の奥の物を取ったりする。人間は手で体を支えることにより二本足では困難な移動を実現したり、作業したりしているのである。本研究は、この様な機能を人間型ロボットで実現しようとするものである。
今回、使用した人間型ロボットはHRP-2プロメテ。身長154cm、体重58kg、腰2軸を含む30自由度を有し、軽量多自由度を実現した人間型ロボットである。
多くの人間型ロボットの二足歩行は、ZMPを指標とした安定化制御で実現されているが、ZMPは全ての接地点が同一平面上にあるときのみ有効な指標である。本研究では、ZMPをロボットと環境の接地点が同一平面上にないときにも使える様に拡張した。これを「一般化ZMP」と呼んでいる。手で体を支えながらの歩行および作業動作(下記(3)を除く)は、一般化ZMPによりロボットの安定な動作が保証されている。今回実現された動作の詳細は次の通りである。
(1) 手摺を掴んで大きな段差を上る動作
これまで、人サイズの人間型ロボットが上ることのできる段差は20cm程度であった。しかし、産業用プラント等では、25cm程度の階段が存在し、実用化のためにはこの程度の段差を上る必要があった。東京大学が開発した人間型ロボットH7は、つま先があるという特徴を活かして25cmの段差を上ることに成功しているが、片脚支持期の安定性には課題があった。本研究では、片手で手摺を掴みながら段差を上ることにより、28cmの段差を安定して上ることに成功した。
(2) 床に置かれた重量物の押し操作
手先に加わる力センサの情報をフィードバックすることで、手先に5kg程度の大きな反力が加わるような場合でも、任意の対象物に対してロボットの安定な動作が保証され、床に置かれた対象物を押す動作を実現した。
(3) 四つん這い動作による狭隘部の潜りぬけ
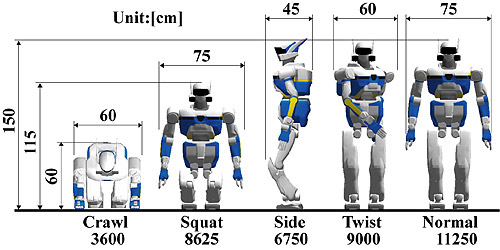
HRP-2P、 HRP-2において起き上がり・寝転び動作を実現した基本技術である状態遷移動作制御を拡張し、二足歩行・四つん這い歩行の滑らかな切り替えを実現した。四つん這い歩行は、高出力の腕と腰の旋回軸を利用したトロット歩行(対角線上の脚を同時に動かす歩行)により1.0km/hでの移動を実現。二足歩行時最高速度の約50%の速度で移動可能となった。四つん這い時の前方投影面積が通常の直立時の32%に縮小され、これを利用して狭隘部の潜りぬけが可能になった。
なお、四つん這い動作は東京大学の人間型ロボットH7(四つん這い時の移動速度0.18km/h)でも実現されているが、今回の動作は移動速度が速いこと、前方投影面積が小さいことが特徴である。(下図参照。)
 |
|
HRP2プロメテの各姿勢における前方投影面積(cm2)
|
(4) 机に手を突いてバランスを取りながらの作業
テーブルの奥に置かれた対象物や、障害物に隠れた場所にある対象物を扱う場合、人間型ロボットは2足で立っている状態で腕を伸ばしても、バランスを維持したままハンドを対象物の場所まで到達させることはできない場合がある。このような場合に、片方の手をテーブルの上について、3点支持状態でバランスを維持しながら、もう片方の手で対象物を扱う動作を実現した。
NEDO技術開発機構の基盤技術研究促進事業「実環境で働く人間型ロボット基盤技術の研究開発」において、滑り易い路面上の歩行技術、産総研の分野別戦略を実現するための予算「ヒューマノイド・ロボット型知能ブースタープラットホーム開発」において、視聴覚機能を備えた人間型ロボットの開発を実施中であり、人間型ロボットのさらなる機能向上を図る計画である。