Yoshio Matsumoto (Leader), Woo-Keun Yoon (Research Scientist) et al., Service Robotics Research Group, the Intelligent Systems Research Institute (Director: Hirohisa Hirukawa) of the National Institute of Advanced Industrial Science and Technology (AIST) (President: Tamotsu Nomakuchi), have developed a small and light robotic arm, Robotic Arm for Persons with Upper-limb Disabilities (RAPUD), by taking into consideration future safety certification standards.
RAPUD is a robotic arm having seven degrees of freedom in arm and hand (a grasping part) parts; it weighs approximately 6 kg and has a payload (the maximum weight of the object that can be grasped and carried) of 0.5 kg. In RAPUD, a linear expansion and contraction mechanism using a continuum of blocks is adopted in order to enlarge the field of vision of the user during operation and to reduce the number of pinching parts (joints) of the arm. Since RAPUD has been designed by considering future safety certification standards, double sensors for measuring joint movements, a high-reliability communication system and so on are adopted. Further, cost reduction of the robotic arm is considered and the arm should be available at easily affordable prices.
It is expected that this small and light robotic arm can be operated independently by persons with upper limb disabilities, who would otherwise require assistance. To realize this, evaluations are carried out by users suffering from muscular dystrophy or cervical spine damage.
The robotic arm will be displayed in the booth set up by the Medical Welfare Technology Subcommittee, Industrial Technical Cooperation Promotion Committee, during the International HCR Welfare Machinery Exhibition held at Tokyo Big Sight (Tokyo International Exhibition Center) from September 29 to October 1, 2009, and at the AIST Open Lab held at AIST Tsukuba on October 15–16, 2009, as a novel research product developed by the AIST Industrial Transformation Research Initiative.

RAPUD attached to a table
|

RAPUD attached to an electric wheelchair
|
|
Photo 1 Developed RAPUD
|
The Ministry of Economy, Trade and Industry promotes the innovation and development of robots and other new machinery with the aim of improving the productivity and quality of life through advancements in robotic technology. In July 2007, the ministry proposed safety guidelines for the operation of next-generation robots. Further, it has set up the Robot Industrial Policy Committee, which aims at increasing the practical applicability of robotic systems, such as life-support robots.
Robotic technology in the field of life-support could possibly develop into a large market. While such a development is desired, participation from real users is critical for the industrialization of life-support robots so that users are satisfied with the system performance. These robots should be available at easily affordable prices. In addition, it is necessary to consider future safety certification standards to ensure operation safety.
AIST promotes advancements in robotic technology with the aim of increasing the applicability of robots in life-support. AIST was involved in a project “Consolidation of Software Infrastructure for Robot Development” (FY2002–2004) for the development of RT (robot technology) middleware for custom-made robot systems. In the systems, the robots and the functional parts are modularized, and the modules can be combined to suit the user’s demand.
An AIST Industrial Transformation Research Initiative “Development of User Centered Robot Open Architecture (UCROA),” a three-year industry-university-government collaboration project, was commenced in 2006 to construct prototypes of next-generation robots which would become available for practical use in 2010, and a large market of the robots is expected. The project also aims to show to the society that robotic products can be developed in accordance with the user specifications through combination of reusable fundamental technologies. RAPUD, one of the three prototypes to be developed in UCROA, has been developed as a part of the study aiming at the practical use of service robots. The results obtained for the three prototype robots have been published in the AIST website on September 28, 2009 and can be accessed from the following link:http://unit.aist.go.jp/is/main/initiative/initiative_j.html.
The target of the development is a small and light robotic arm which can be operated by persons with upper limb disabilities and can support their lives. AIST aimed to realize low costs of the arm by developing inexpensive parts and integrating existing technologies.
RAPUD was efficiently developed by integrating many technologies and systems developed so far at AIST: design technology for a small and light robotic arm, a safety and reliability technology, a small CPU board, a three-dimensional vision system, a control interface technology, and a user-centered robot with an open architecture using base technologies such as RT middleware.
1. Small and light robotic arm
On the basis of risk assessment, we achieved high operation safety by adopting a linear expansion and contraction mechanism instead of a rotating elbow joint. This lowers the risk of pinching clothing or objects. The shape is appropriately designed without acute angles. The robotic arm is made of resin blocks so that it is lightweight. RAPUD, which has a hand and an arm with seven degrees of freedom, weighs 6 kg and is approximately 75 cm in height and 40–100 cm in length; its payload is 0.5 kg. As this arm is small and light, one-touch attachment and detachment become possible when desired by the user. For example, RAPUD can be easily transferred from the user’s bedside to an electric wheelchair.
2. Safety and reliability
Risk assessment is carried out at each stage of the development of RAPUD, and high safety is achieved by adopting double sensors system and a communication module that meets the safety certification requirements and by developing a distributed control module and a safety relay module.
3. Small CPU board
A small, high-performance power-control CPU board of the size of a business card is developed for the robot by using a CPU for embedded machinery and by implementing various input and output interfaces such as LAN, USB, a serial port, and a digital input and output.
4. Three-dimensional vision system
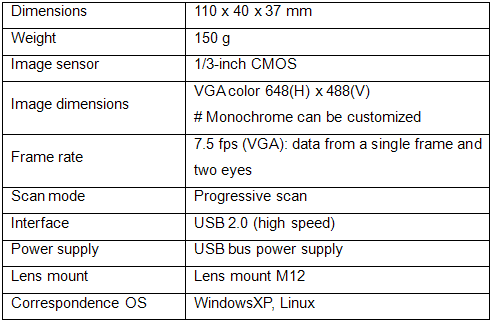
The following have been newly developed for our RAPUD: a small stereo camera to be attached to the arm and an RT component that helps the arm grasp an object by detecting its position and posture after observation.
|
Table Specifications of small stereo camera developed in the AIST Industrial Transformation Research Initiative
|
 |
5. Control interface
One can easily operate RAPUD by using a small joystick, an automatic scan-type input panel with a single switch, and a general-purpose keypad. A control interface that can be customized in accordance with the user’s demand has been newly developed.
6. RT middleware
Flexible customization is possible because each element is developed as an RT component working on the RT middleware.
Operation evaluations were conducted on RAPUD having a user control interface with cooperation from real users (people suffering from muscular dystrophy or cervical spine damage) by Shimoshizu Hospital, National Hospital Organization, and Prof. Takashi Kinose, Nihon Institute of Medical Science. The results of the evaluations were used in the development for making further improvements to RAPUD. More operation evaluations are underway for further improving RAPUD so that it becomes more suitable for practical use.
|
Photo 2 Grasping a PET bottle with RAPUD attached to a wheelchair
|
 |
We plan to improve the reliability and usability of RAPUD through communication with real users so that its applicability can be increased. We will combine RAPUD with a movable base, a camera, and a microphone, and build a RT component system with better expandability and evolvability so that it can cater to individual demands such as picking up an object that has fallen onto the table top or the floor.
However, we cannot eliminate the risk of accidents when using robotic arms, as their use involves physical contact, and therefore, it is inappropriate to sell these robotic arms to unspecified users. Operational backup, including training under expert guidance and judgment of RAPUD’s usability, are necessary. For the operational backup, it is important to maintain a balance between convenience and risk. Further advancements to the technological development in operative aspect will be made on the basis of the feedback obtained from real users and experts such as physical therapists.
Life Robotics Inc., a certified AIST venture company aiming at the sales and marketing of RAPUD, has acquired several intellectual property rights for RAPUD. For the high-reliability communication system, planning and verification of technological developments and the business model are necessary for launching a business venture for the sale of the system; these tasks are carried out by the taskforce promoted by the AIST Innovation Center for Start-ups. Small CPU boards and stereo cameras have already been manufactured by other companies and are being adopted in many types of robots used in various fields.