独立行政法人 産業技術総合研究所【理事長 野間口 有】(以下「産総研」という)知能システム研究部門【研究部門長 比留川 博久】ヒューマノイド研究グループ【研究グループ長 横井 一仁】中岡 慎一郎 研究員らは、人間型ロボットの全身動作を直接作成・編集できる統合ソフトウエア「Choreonoid(コレオノイド)」を開発した。
このソフトウエアは、ユーザーが入力した一連の人間型ロボットの動作姿勢(キーポーズ)を力学的に安定な動作へ瞬時に自動変換し、ロボットの専門知識がなくてもCGキャラクターの動作を作成する感覚で、人間型ロボットの多様な振る舞いを簡単に作成できるものである。この技術により、人間型ロボットを用いた新たなコンテンツ産業の創出が期待される。
なお、石川 勝氏(東京大学 IRT研究機構 特任研究員)とSAM氏(ダンスクリエイター/ダンサー)のプロデュースにより、「Choreonoid」を用いたサイバネティックヒューマンHRP-4Cのダンスデモンストレーションを、東京都江東区の日本科学未来館で開催されるデジタルコンテンツEXPO 2010にて2010年10月16、17日に公開する。また、この技術の詳細は2010年10月18~22日に台北市で開催される国際会議IEEE/RSJ International Conference on Intelligent Robots and Systemsで発表される。
 |
|
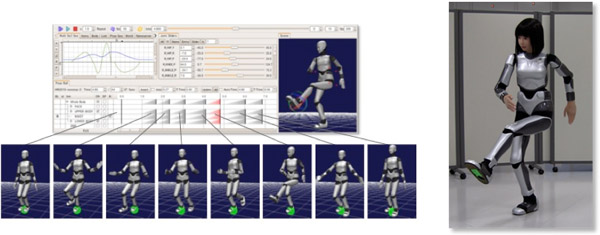
図1 開発した統合ソフトウエア「Choreonoid」による動作の編集例
|
最近、人間型ロボットの研究開発が精力的に行われているが、人間型ロボットの応用は、学術分野などに限定されており、コンテンツ分野を中心とした新たな人間型ロボット市場の創出が期待されている。
コンテンツ分野において人間型ロボットの利用を促進するためには、テレビ、PC、ゲームなどのように、ハードウエアは技術者が制作し、コンテンツ(ソフトウエア)はクリエイターが制作するといった制作者の分離が必要とされる。しかし、コンテンツの制作者は、ロボットの専門知識をもたないため人間型ロボットの能力を十分に活用したコンテンツを作成することは困難であった。
産総研は、ロボット技術とメディア技術の融合による新たなコンテンツ産業の創出を目指し、それを実現するための人間型ロボットとして、人間に近い外観と動作性能を備えたサイバネティックヒューマンHRP-4Cを開発した。さらに、HRP-4Cの性能を最大限に引き出したコンテンツを容易に作成できる統合ソフトウエアの開発に取り組み、コンテンツ分野へのさまざまな応用を試みている。
なお、本研究開発の一部である動作パターン設計ツールは、独立行政法人 新エネルギー・産業技術総合開発機構の委託事業「次世代ロボット知能化技術開発プロジェクト(平成19年度~23年度)」による支援を受けて行ったものである。
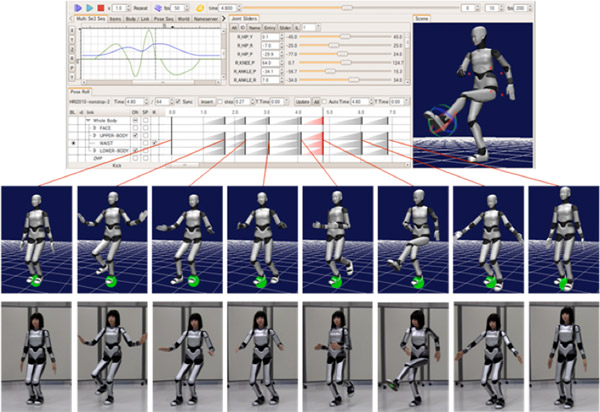
今回、人間型ロボットの全身動作を直接作成・編集する方法を考案し、統合ソフトウエア「Choreonoid」を開発した。(「Choreonoid」は、Choreograph(振り付けをする)とHumanoid(人間型ロボット)を組み合わせることで命名した。)このソフトウエアの使用例を図2に示す。それぞれの姿勢はユーザーが与えるキーポーズと呼ばれるものであり、これらをつなぎ合わせることで一連の動作を構成する。また、与えるキーポーズを変化させることで多様な動作を表現できる。
 |
|
図2 「Choreonoid」のキーポーズ入力・編集画面(上)と作成した動作の例(下)
|
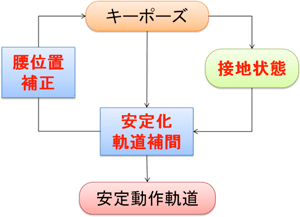
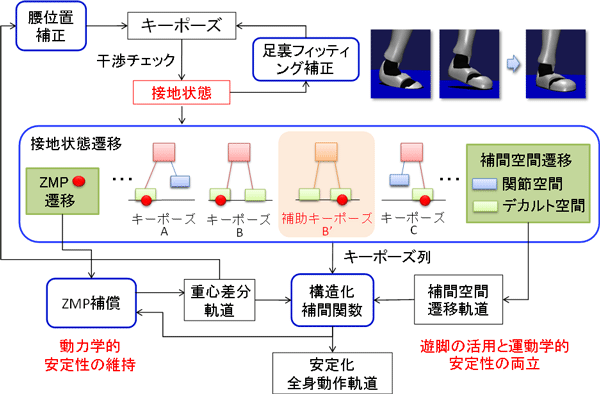
ただし、二足歩行ロボットの場合、キーポーズを単純につなぎ合わせるだけでは、ロボットと床との間の力学的なバランスや、着地時の足への衝撃などが全く考慮されていないため、実際には転倒などの問題が生じることが多い。特にHRP-4Cのように等身大で足裏が小さいロボットでは、この問題の影響が大きく、キーポーズの単純なつなぎ合わせで安定に動作させることは不可能である。そこで、ユーザーがキーポーズの入力や修正を行う度に、動作を安定に行うためのキーポーズの補正・つなぎ合わせを自動で行う技術を開発した。この技術により、作成した動作は図2の下部に示すようにそのまま実際の二足歩行ロボットで実行可能となる。図3に本技術の概念図、図4に詳細図を示す。
 |
|
図3 安定に動作させるための補正・補間機能の概念
|
 |
|
図4 キーポーズの補正・補間方法の詳細な流れ
|
ユーザーが入力したキーポーズは、まず接地状態がチェックされ、足裏が地面にめり込んだり、接地すべき足が浮き上がっていたりしないよう、足裏を床面にフィッティングさせる補正が行われる。次に接地状態を滑らかに遷移させるために、Zero Moment Point(ZMP)遷移の決定と補間空間遷移(関節空間とデカルト空間の遷移)の決定が内部で行われる。その際、与えられたキーポーズだけでZMPの遷移をスムーズに行うことができない場合は、図4のB’に示すような補助的なキーポーズが自動的に挿入される。また、足裏の離反や着地をスムーズに行うための補助キーポーズも追加される。このようにして得られたZMP遷移・補間空間遷移・キーポーズ列を統合的に処理することにより、安定な動作軌道を得ることができる。さらに、この結果はユーザーが入力したキーポーズにフィードバックされ、必要に応じて各キーポーズの腰の位置が自動的に補正される。以上の処理は、ユーザーがキーポーズの入力や修正を行う度に行われるため、ユーザーは自分の希望する動作が生成できているかを判断しながら動作を作成することができる。
これらの技術により、ロボット制御プログラミングなどの専門知識がなくても、ロボットの能力を最大限に活用した振る舞いを作成できるようになった。また、このソフトウエアは一般的なPC上で使用でき、このソフトウエアだけで動作を作成できるため、手軽に利用できる。
今後は、「Choreonoid」を広く一般に公開し、さまざまなクリエイターとの共同により、人間型ロボットの新たなコンテンツ制作を行っていく予定である。