川田テクノロジーズ株式会社【代表取締役社長 川田 忠裕】のグループ企業である川田工業株式会社【代表取締役社長 川田 忠裕】(以下「川田工業」という)は、独立行政法人 産業技術総合研究所【理事長 野間口 有】(以下「産総研」という)と共同で、働く人間型ロボット研究開発用プラットフォーム:HRP-4(以下「HRP-4」という)を新たに開発した。共同開発の分担は、川田工業が人間型ロボットハードウエアの開発を行い、産総研 知能システム研究部門 ヒューマノイド研究グループ【研究グループ長 横井 一仁】 金広 文男 主任研究員らが動作制御ソフトウエアの開発を行った。
HRP-4は産総研が開発したサイバネティックヒューマンHRP-4Cの高密度実装技術を応用し、さらに物体操作に適するように片腕7自由度とし、全34自由度を持ちながら、身長151 cm、体重39 kgの軽量でスリムなボディーを実現した。また、HRP-4の制御システムにはRT-Preemptパッチを適用したLinuxカーネルおよびソフトウエアプラットフォームOpenRTM-aistを採用し、オープンソースのロボットシミュレーターOpenHRP3をはじめ、国内外の多数のロボットシステム用のソフトウエア資産が利用可能となっている。これにより、さまざまな環境の下で稼動する人間協調型ロボットなど、今後のロボット産業で必要な次世代ロボットシステムの研究開発を加速することが期待される。
なお、HRP-4は、2010年9月22~24日に名古屋工業大学で開催される日本ロボット学会学術講演会で一般公開・展示される。
 |
|
HRP-4
|
|
人間型ロボットHRP-4_基本ポーズ集
|
人間型ロボットHRP-4_歩行・体操他
|
わが国は急速な少子高齢化が進み、その対策として労働力の補完を目的とした、人と共存する場所での単純・繰り返し作業を代行・支援できるロボットの実現が21世紀初頭の急務とされている。人が働く職場、生活する家、使用する機械などは、いずれも人の大きさや機能に合わせて作られていることから、等身大の人間型ロボットにより人の機能を代行・支援できれば、環境側への再投資は最小限に留めることができ、社会全体のコストの低減も図れるとされている。このように、等身大の人間型ロボットは、次世代ロボットの最終形態の1つとして期待され、大学、研究機関をはじめ民間企業でも近年精力的に研究開発が行われてきた。
しかし、等身大の人間型ロボットを産業化するためには、解決しなければならない研究開発課題が数多く残されており、その1つとして製作コストが挙げられている。現在、身長50 cm以下の小型の人間型ロボット市場では低価格化により、国内外で数多くのロボットが製品化されている。しかし、人が活動している実環境での本格的な研究開発用としては、大きさなどに問題があり、低価格な等身大の人間型ロボットが新たに求められていた。
加えて、ロボットのソフトウエア開発はロボットの運用タイプや開発機関ごとに進められることが多く、各機関がすべてのソフトウエアを一から開発していることが、ロボットの産業化を妨げている一因となっていた。また、システム間のインターフェースの互換性や標準が存在しないため、他の機関で開発されたソフトウエア資産を再利用するのに多大な労力を要している。こうした問題を解決するために、人間型ロボットのソフトウエアにも、国際標準に準拠したインターフェースを採用することにより、相互運用性向上を実現することが期待されていた。
2003年3月より川田工業とゼネラルロボティックス株式会社【取締役社長 五十棲 隆勝】(以下「GRX」)および産総研は、働く人間型ロボットの研究開発用プラットフォームとして人間型ロボットHRP-2のハードウエアと制御ソフトウエアを、国内外の大学・研究機関に数多く提供してきた。しかし、まだまだ高価格であることや、HRP-2の開発・発表から既に8年が経ち、ロボット本体だけではなく部品などの性能や仕様にも新しい開発テーマに対応が難しいものも現れはじめ、新しい働く人間型ロボットの研究開発プラットフォームを求める声が上がっていた。
産総研は、2006年度から3ヵ年計画で実施した産学連携プロジェクト「産総研産業変革研究イニシアティブの「ユーザ指向ロボットオープンアーキテクチャの開発」の一環としてサイバネティックヒューマンHRP-4Cを開発し、また、その製作を川田工業が担当したことを契機に、2009年6月から、低価格な等身大の働く人間型ロボットの研究開発用プラットフォームの共同開発に着手した。制御システムには、ロボットのさまざまな機能要素を通信ネットワークを介して自由に組み合わせるため、産総研が開発しているソフトウエアプラットフォームOpenRTM-aistを採用し、今回、軽量・コンパクトでコストを抑えたHRP-4として完成した。
なお、HRP-4の開発は、HRP-2、HRP-3、HRP-4Cの開発技術を継承するとともに、本田技研工業 株式会社の特許権を実施することにより利用している。
人と共存できる作業ロボット事業を目指す川田工業は、人と安全に協業するため、従来のHRPシリーズに比べて人間型ロボット本体の小型・軽量化とスリム化を実現しながら、物体操作に欠かせない双腕の自由度を増やすなど、よりインタラクティブ技術の研究に適するよう設計を見直した。また、ロボットの安全要求に配慮して、すべての関節軸に80 W以下のモーターを採用するなど、新しい働く人間型ロボット研究開発用プラットフォームとしてのHRP-4を実現した。具体的内容は以下の通りである。
-
身長151 cm、体重39 kgのスリムなボディーでありながら、片腕で7自由度を含む全34自由度の構成(従来開発のHRP-2は身長154 cm体重58 kg 全30自由度)
-
関節軸にはすべて80 W以下のモーターを採用し、安全に配慮した設計
-
片腕の可搬重量は0.5 kg
-
搭載機器や関節軸構成の最適化、構造設計における部品の共通化や簡素化により低価格化を実現
-
背面には小型ノートPCが搭載可能であり、情報処理能力の拡張性にも配慮
-
外観デザインには人との親和性を追求。「スリム・アスリート」のコンセプトをデザイン設計に盛り込んだ

図1
|

図2
|
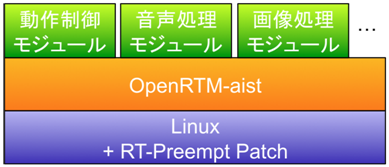
動作制御システムを開発した産総研は、OSにハードリアルタイム処理を可能とするためのRT-Preemptパッチを適用したLinuxカーネルを採用し、標準的なPOSIX APIを用いた実時間ソフトウエア開発および近年一般的になったマルチコアプロセッサの有効活用を可能とした。また、通信ネットワークを介してロボットのさまざまな機能要素を自由に組み合わせるソフトウエア基盤技術、RTミドルウエアの実装であるOpenRTM-aistをミドルウエアとして採用した。動作制御ソフトウエアはHRPシリーズで培われてきた動作制御技術をコアロジックとして組み込んだRTコンポーネント群で構成され、これによりRTミドルウエアに対応した開発ツール群および既存のRTコンポーネント群を用いた効率的な開発が可能となった。具体的内容は以下の通りである。
-
HRPシリーズで培われた動作制御技術を継承し、低出力モーターでありながら安定した歩行動作を実現
-
ロボットシミュレーターOpenHRP3に対応したロボットモデルおよび動作制御用RTコンポーネント群を提供
-
RTミドルウエアに対応したソフトウエア開発ツールチェーンであるOpenRTPを用いて効率的な開発が可能
-
コミュニケーション機能の実現に必要な音声認識・音声合成・対話制御などのRTコンポーネント群を提供するOpenHRIや画像処理ライブラリーOpenCVを用いたRTコンポーネント群など、RTミドルウエアに対応したさまざまな既存のソフトウエアと組み合わせることで、豊富なアプリケーションを容易に構築することが可能
 |
|
図 HRP-4のソフトウエアシステム
|
人間型ロボットの研究開発を加速させるため、従来の研究開発用人間型ロボットHRPシリーズに比べ大幅な低価格化を図るだけでなく、保守も含めたトータルな低価格化を図る。HRP-4は川田工業にて受注生産し、2011年1月以降に国内外の大学・研究機関向けに提供される予定である。