独立行政法人 産業技術総合研究所【理事長 野間口 有】(以下「産総研」という)
ヒューマンライフテクノロジー研究部門【研究部門長 赤松 幹之】ユビキタスインタラクション研究グループ【研究グループ長 宇津木 明男】中村 則雄 主任研究員は、人間の錯覚を利用して高感度な
触力覚を連続的に提示できる小型の非ベース型錯
触力覚インターフェースと立体テレビを組み合わせることで、立体映像に触覚(感触)や力覚(手応え)を与え、さらに感触で確認しながら形状デザインを行うことができるシステム「i
3Space(アイ・キューブ・スペース)」を開発した。
このシステムは触覚や力覚に関する錯覚を利用して触感や手応えを提示する技術を応用したものであり、錯触力覚インターフェースに位置検出用マーカーを装着してユーザーの動作を認識し、それに合わせて触覚や力覚の提示をリアルタイムで制御して立体映像に触力覚を与える。触覚や力覚の提示に加えて視・聴覚など複数の感覚を統合したインターフェースの3次元化により、手術シミュレーターや3次元CAD(Computer Aided Design)による設計デザインへの応用が期待される。
なお、この技術の詳細は、2010年8月31日(火)~9月2日(木)にパシフィコ横浜 会議センターで開催されるゲーム開発者向けカンファレンスCEDEC 2010で発表・展示される。
近年、立体ディスプレーなどにより臨場感のある立体映像を楽しむことができるようになった。またスマートフォンなどに用いられている
マルチタッチパネルにより直感的な操作性が向上してきた。このような立体映像やタッチ操作は、ゲーム機器をはじめとしたさまざまな製品開発に大きな影響を与えようとしている。その1つとして、立体映像に触った感触や手応えを体感できる「触れる立体テレビ」を実現することで、手術シミュレーターや3次元CADによる設計デザインへの実現が期待されている。
従来、触覚や力覚の提示法は、ロボットアーム型のインターフェースが主流であったが、複数の指や両手で操作したときにアーム同士がぶつかってしまうなど装置自体がユーザーの動作の邪魔になってしまうことがあった。近年では、偏心モーターを用いて持ち運びできるような小型の機器が開発されているが、映像との接触を偏心モーターによる振動で示すため、力の方向を提示できず映像との違和感が生じていた。また、これらの触力覚インターフェースは、実体が存在しない3次元空間で、感触や手応えを与える十分な機能・性能が達成されていない。
産総研は、人間特性の計測評価技術の研究開発によって人間の認知行動特性に適合した情報支援・行動支援環境の創出を目指しており、これまでに、対象物の位置・大きさ・硬さの知覚や動き・形状の変化といった多様な表現を可能にした非ベース型錯触力覚インターフェース「
GyroCubeSensuous」を開発した(
2005年4月11日、プレス発表)。また、そのインターフェースの小型化にも成功している(2007年6月27日、産業用バーチャルリアリティ展に出展)。
今回開発した「i
3Spac」は、立体映像に感触や手応えを与え(
可触化)、複数の指で立体映像を直接操作(マルチタッチの3次元化)できるようにしたバーチャルリアリティー(VR)空間生成システムである(図2)。錯覚(
illusion)を活用し、直感的(
intuitive)な空間理解と自然な操作性によって、ひらめき(
insight)の創出を支援する活動空間(
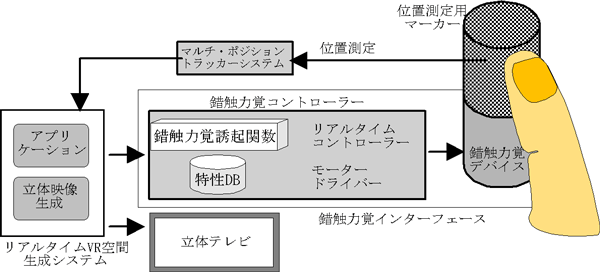
space)を提供することをコンセプトとしている。このシステムは、立体映像の触力覚シミュレーションを行うリアルタイムVR空間生成システム、錯触力覚インターフェース(触力覚を提示する錯触力覚デバイスとデバイスを制御する錯触力覚コントローラー)、指の動きを測定するマルチ・ポジション・トラッカーシステムから構成される。
リアルタイムVR空間生成システムは、コンピューター内のVR空間で、環境や物理モデルの動きをシミュレーションして、動きに合わせた反力や立体映像を生成するシステムである。ユーザーの動作や指の位置から物理モデルに働く力を計算し、この力による物理モデルの変形・動作がシミュレーションされて、ユーザーに働く力や立体映像が生成される。ユーザーの動作に対する応答を生成する一連の処理がリアルタイムで行われる。
マルチ・ポジション・トラッカーシステムは、ユーザーを複数のカメラで取り囲み、指先に装着したマーカーの位置を測定するシステムである。複数台のカメラを使用することで死角のない測定が可能である。
錯触力覚デバイスは産総研で開発した「GyroCubeSensuous」を採用している。
 |
|
図2 i3Spaceのシステム構成
|
① 立体映像の可触化(図3)
通常のタッチパネルは接触対象であるパネルが平面であるため、操作ポイントの選択や確認が容易である。しかし、立体映像に対するタッチ操作では、触ったという触力覚フィードバックがないと接触の確認のため、映像上の接触点を凝視しなければならず、また、立体映像からの反力がないために自然な操作性が得られにくい。そこで、このシステムでは、指先の位置を測定し、指と立体映像との接触および力の相互作用を計算し、その力を錯触力覚インターフェースで提示することで立体映像に指で触れた感覚を与えている。
指を押しつけるという動作に対して、抗力や摩擦力を再現することは、指の動きと力の方向が一致しない場合や実体が存在しない立体映像の場合は難しい。また、静止した指に対して力を感じさせ続けることはさらに難くなる。このシステムでは振動に対する錯覚を利用することで実体が存在しない立体映像でも触力覚の提示を可能としている。
また、立体視では、映像が手元に見えるように飛び出し感を強調し過ぎると眼精疲労の原因になりかねない。これは、右眼および左眼に入射する映像の分離が悪くなることと、ユーザーが感じる立体映像の位置と実際のディスプレー画面における画像の位置が一致しないことによる。そこで、このシステムでは立体像と指の位置を一致させずに、立体映像にかざした指先に手応えを提示する間接的可触化を行っている。
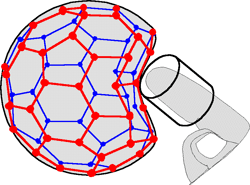
② 3次元マルチタッチ(図4)
タッチパネル上でのマルチタッチでは、複数の指とタッチパネルとの接触および接触点の移動により、移動・拡大・縮小・変形などの操作が直感的に行われている。これに対して、このシステムでは、マルチ・ポジション・トラッカーシステムによって6方向から同時に複数の指の動きを測定するので、指の動きが手のひらによって隠されることなく、指の位置から、指と立体映像との接触、立体映像をつまんだクリップ動作、クリップした後の拡大・縮小動作が検出できる。これをもとに、立体映像と指との間に働く感触や手応えを計算し錯触力覚インターフェースを制御することで、力を感じさせている。この技術により、複数の指先の動作で立体映像の移動・変形・回転操作を3次元で直感的に行うことが可能になっている。

図3 立体映像からの感触や手応えを得ている様子
|

図4 3次元マルチタッチ(変形)
|
●応用:力覚フィードバックを用いた3次元CADによる設計デザインの支援(図5)
従来のCADによる設計デザインでは、形状情報の入力はマウスやキーボードによる数値入力によって行われてきた。最近ではデザイン性を重視した家電製品の人気が高く、コンセプトイメージを表した感性的なデザイン画をもとに設計を行うため、設計図作製者が形状情報をCAD用に数値化する必要がある。このとき、デザイナーの意図が数値データには十分に反映されないことが頻繁に発生している。今回開発したシステムを応用することで、立体映像の変形による反力を力覚で確認しながら変形具合を調整し、3次元形状をデザインすることが可能となり、同時にデザイン結果が数値データとして得られる。また、足元のバランスセンサーにより体重移動および姿勢をモニタリングすることで3次元空間内での視線の移動を補助できる。ろくろを用いた陶芸のように、立体映像を回転させ感触で確認しながら壺の立体造形を行うことができ、感性を刺激しながらの創作活動を支援することができる。
 |
 |
|
図5 力覚フィードバックによる3次元デザイン支援
|
本技術は産総研単独開発による成果であり、ベンチャー創業を目指す。今後は小型化・高機能化を進めるとともに、スマートフォンなどへの対応および家電・情報機器メーカーとの連携・共同開発を推進することにより、用途に応じた開発および実証実験を図りたい(図6)。
 |
|
図6 今後想定される応用
|