独立行政法人 産業技術総合研究所【理事長 吉川 弘之】(以下「産総研」という)は、川田工業株式会社【代表取締役社長 多田 勝彦】(以下「川田工業」という)と共同で、人間サイズ(HRP-2プロトタイプ:身長154cm、体重58kg、腰2軸を含む30自由度を有し、軽量多自由度を実現)の人間型ロボットによる起き上がったり・寝転んだりする動作に世界で初めて成功した。
仰向け(うつ伏せ)状態から起き上がって直立状態へスムーズに遷移したり、さらに、直立状態から仰向け(うつ伏せ)状態にスムーズに遷移することを可能とした。本動作は、「バックパックがなく、腰関節と高出力の腕を備えた人間に近いハードウェア」と、「新たに開発した重心位置を制御して支持状態を遷移させる全身動作制御ソフトウェア」の組み合わせにより実現したものである。
これまでにも身長60cm以下の小型の人間型ロボットでは、起き上がれるものが開発されていたが、身長120cm以上の人間サイズの人間型ロボットで、起き上がりを実現したのは世界初である。体が大きくなると、起き上がるあるいは倒れる際の慣性力の影響が大きくなるため、バランスを取りながら動作させることが難しくなることから実現されていなかった。
本成果によって、たとえ倒れても起き上がり、作業が継続できるという、働く人間型ロボットの必須条件の実現に大きく前進したことになる。さらに、これまでの一度の失敗も許されない「如何に倒れないように歩くか」一辺倒であった人間型ロボットの運動制御の技術開発方針を、「失敗を許容してそこからどのように回復するか」という方向に大きく転換させるものである。
今後は、寝転んだ状態あるいは四つん這い状態からの動作バリエーションの増加と転倒制御技術を追加し、不測の事態により転倒した場合にも安全に起き上がれる人間型ロボットの動作ソフトウェアを構築する予定である。さらに、これらを広く一般に提供することにより、人間型ロボットを用いた研究開発をさらに加速させたいと考えている。
なお、共同研究の分担としては、産総研知能システム研究部門の 金広 文男 研究員らが動作制御ソフトウェア等を担当し、川田工業がHRP-2プロトタイプのハードウェア開発を担当した。
また、本研究開発は、経済産業省が1998年から5年計画で実施中の「人間協調・共存型ロボットシステムの研究開発( Humanoid Robotics Project、以下「HRP」という)」【プロジェクトリーダー 井上 博允 東京大学教授】の一環として、産総研と新エネルギー・産業技術総合開発機構(NEDO)【理事長 牧野 力】から委託を受けた財団法人製造科学技術センター(MSTC)【理事長 亀井 俊郎】との共同研究により実施されているものである。
我が国の産業用ロボットの市場規模は世界最大であるとは言え、1980年代から年間5,000億円~6,000億円程度で横ばい状態にある。その最大の理由は、ロボットが出来る仕事の種類が増えなかったことと、出来る仕事を増やせるほど技術革新が進まなかったことである。
ところが、1996年に本田技研株式会社【取締役社長 吉野 浩行】(以下、「本田技研」という)が人間型ロボットP2を発表して以来、幾つかの人間型ロボットが開発され、人間型ロボットは一つの技術エポックを迎えている。最近でも、本田技研がASIMO、ソニー株式会社【会長兼CEO 出井 伸之】がSDR-4Xを発表し、ASIMOはイベント用にレンタルされ始めている。しかしながら、これらのロボットの利用目的は、現在までのところエンターティメント分野に特化されており、「仕事をする」人間型ロボットを志向したものとはなっていない。ロボットの市場規模を飛躍的に拡大するためには、ロボットが出来る仕事の種類を大きく増やすことが必須である。
HRPは、人間型ロボットの応用事例を研究することにより、「働く人間型ロボット」の実現可能性を世の中に示すことを目的としている。20世紀最大の商品の一つは自動車であったが、人間型ロボットは21世紀最大の商品の一つになる可能性を秘めており、HRPはその第一歩となるものと期待されている。この様な背景の下で、今回、起き上がり動作に成功したことは、人間型ロボットを用いる場合の大きな問題点の一つであった「転んだらおしまい」という問題の解決に繋がる重要な成果である。
また、安全に「四つん這い」さらには「寝転べる」ということは、ロボットに出来る仕事の種類の増加にも繋がる。これらの両面から、本成果は働く人間型ロボットの実用化に大きく貢献するものと期待される。
HRPは、1998年からの5年計画のプロジェクトで、前期2年間で研究の共通基盤となるプラットフォームを開発し、後期3年間でプラットフォームを用いた応用研究を実施中である。前期に開発したプラットフォームは、人間型ロボットHRP-1、遠隔操作コックピット、仮想プラットフォームから構成されている。後期で実施中の応用5分野の内4分野はHRP-1を用いて研究開発を行っているが、「屋外共同作業」については、不整地上の歩行や転倒制御、転倒回復等の特別の仕様が要求されるため、改良型ロボットHRP-2を開発し、これを用いて実現する計画となっている。現時点では、HRP-2のプロトタイプであるHRP-2Pを用いて、今回発表した動作を含む屋外共同作業の基本動作の実現を目指している。
今回、使用した人間型ロボットはHRP-2プロトタイプ。身長154cm、体重58kg、腰2軸を含む30自由度を有し、軽量多自由度を実現した人間型ロボットである。
起き上がり動作のポイントは、重心位置を適切に制御することで体の支持状態(四つん這い状態や二本足で立った状態等)を滑らかに遷移させる事にある。新たに開発した全身動作制御ソフトウェアでは、起き上がり動作中の支持状態の変化に着目して、動作をいくつかの部分動作に分解し、それぞれの支持状態に応じた重心位置制御を行うことで次の支持状態へ滑らかに遷移させ、一連の起き上がり動作を実現している。
ハードウェア的には、電装系の高密度実装によりバックパックのような起き上がり動作を阻害する突起物をなくし、腰軸の追加により胴体前後方向の重心移動量を増大させ、脚と同程度の出力を腕に持たせることにより腕で上体を支持し起き上がることを可能とした。
なお、今回実現した動作は、以下に示す利点を有しており、この面からも特筆すべき成果である。
1)安全に仰向け(うつ伏せ)状態になれることは、例えば、障害物の下を潜り抜けたり、自動車の下回りを点検したりする作業を実現するために必要不可欠な動作である。
2)人間型ロボットが、人と同じく起立し続けるためには絶えず制御をかけておかなければならない。このためのエネルギーも必要である。寝転ぶことができれば、人と同じように寝て、エネルギー消費を抑えることができる。
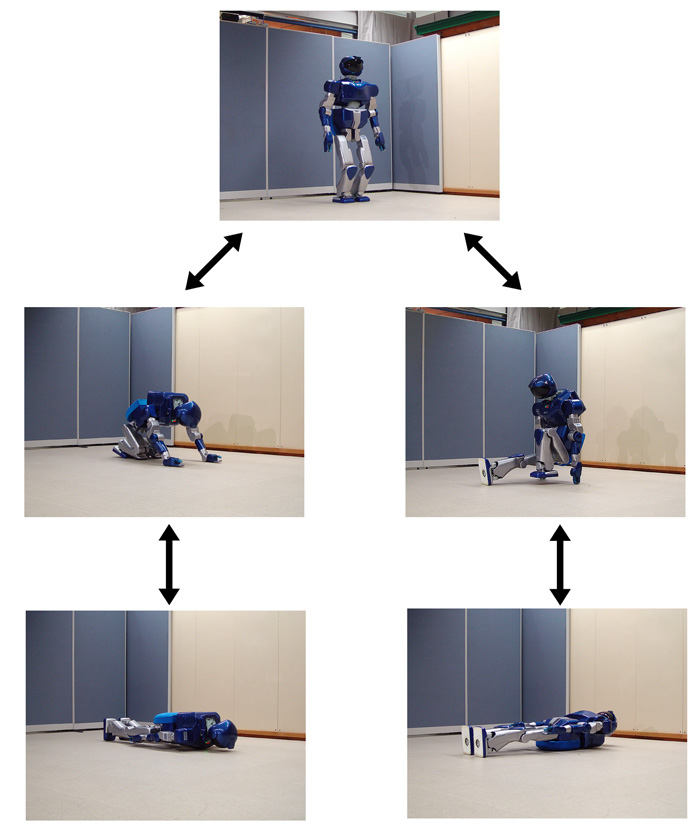
重心位置を適切に制御し体の支持状態を滑らかに遷移させることで
起きあがり・寝ころび動作を実現
現在は自ら遷移した仰向け(うつ伏せ)状態から起き上がり動作を行っているが、今後は転倒制御技術を追加して、不測の事態により転倒した場合にも起き上がれるようにしていく予定である。
また、2002年末には最終成果機HRP-2を完成させる予定であり、研究開発用として外販することも検討中である。なお、HRP-2においては、内部APIが公開されユーザによるソフトウェア開発が可能となる計画である。
くわえて、制御ソフトウェア部分については、近くソフトウェアベンチャー会社を設立し、HRP-2の制御ソフトウェアの運用・保守や新規のソフトウェアの研究開発を行っていく計画となっている。