国立研究開発法人 産業技術総合研究所【理事長 中鉢 良治】(以下「産総研」という)とフランス国立科学研究センター【理事長 Antoine Petit】 (以下「CNRS」という) が共同で産総研 情報・人間工学領域 【領域長 関口 智嗣】 に設置したAIST-CNRSロボット工学研究ラボ【研究ラボ長 Abderrahmane Kheddar】 Ganesh Gowrishankar CNRS主任研究員、同領域 知能システム研究部門【研究部門長 河井 良浩】 吉田 英一 副研究部門長は、国立大学法人 東京工業大学【学長 益 一哉】(以下「東工大」という)科学技術創成研究院 小池 康晴 教授、吉村 奈津江 准教授と国立大学法人 大阪大学【総長 西尾 章治郎】(以下「大阪大」という)大学院情報科学研究科 安藤 英由樹 准教授と共同で、脳の予測機能を利用し、脳波から高速・高精度に思い描いた運動(運動意図)を読み取るブレーン・コンピューター・インターフェース(BCI)技術を考案した。
脳波から運動意図を直接読み取る従来のBCI技術では、精度を高めるための訓練を要したため、使用者の負担が大きかった。今回考案した技術は、運動を行う際に脳が運動を行った後の体の状態(運動結果)を予測する機能を利用している。運動を錯覚させる刺激を与え、運動意図から予測した運動結果と錯覚した運動結果のずれを脳波から読み取り、そのずれから運動意図を精度良く推定できる。前庭電気刺激(GVS)により運動を錯覚させて、脳波から左右への運動意図を推定する実験により、100ミリ秒以内の計測で、平均85 %以上の精度で運動意図が推定できることが確認できた。訓練が不要で、負担が小さいため、四肢麻痺患者などが車いすなどの外部機器を操作するインターフェースへの適用が期待される。
なお、この技術の詳細は、2018年5月9日に米国科学雑誌Science Advances誌で発表された。
 |
|
今回開発したBCI技術の概要 |
脳から信号を読み取り、計算機につなぐインターフェースであるBCIの究極の目標は、思い通りに機械を操作できることである。例えば、腕を失った人がBCIにより義手を思い通りに動かせれば、大きな生活改善につながると期待できる。過去20年に渡り、多くのBCIの方法が提案されてきたが、個々人の脳波の特徴に合わせて装置を設定するための長時間の訓練や、また画像による視覚的な入力に反応して発生する脳波を検出するなど、追加の感覚刺激(認知的負荷)が必要である、という課題があった。
産総研とCNRSが共同で設置したAIST-CNRSロボット工学研究ラボでは、BCI技術によるヒューマノイド操作や人間・ロボットの身体の共有感覚の解明などの先進的な人間・ロボット調和技術を開発してきた。一方で、東工大では脳信号解析技術を、また大阪大では脳への外部信号入力技術の開発を進めてきた。今回、共同研究により各機関の技術を結集して、長時間の訓練や追加の認知的負荷が不要で、より優れた推定結果を出す新しい運動意図の解析技術を開発することとした。
なお、本研究開発の一部は、産総研・CNRSロボット工学共同研究による支援を受けた。
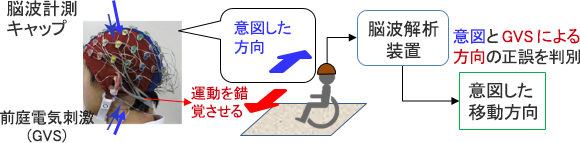
人間は運動を行うとき、脳が持つ身体モデル(順モデル)に基づいて運動後の体の状態を予測して、意図した結果との誤差(予測誤差)が小さくなるように筋肉に運動指令を出すと考えられている。今回、この予測誤差が脳波に大きな影響を与えると考え、これを運動意図の推定に利用する新しいBCIの手法を考案した。この手法では、外部から感覚を刺激する装置を用いて錯覚させた運動の結果と、実際の運動意図から脳が予測した運動の結果との予測誤差を脳波から検出する。検出した予測誤差と、刺激によって錯覚させた運動から、運動意図を推定する。従来の手法は、使用者が意図する動きを脳波から直接的に解読する方法が用いられてきたが、開発した手法は解読する対象が予測誤差である点が異なっている。具体的には、錯覚を引き起こす人工的な感覚刺激装置 (前庭電気刺激(GVS)) と脳波を用い、使用者が意図した動きと外部刺激によって錯覚した動きとが合致する度合いを評価して識別する。
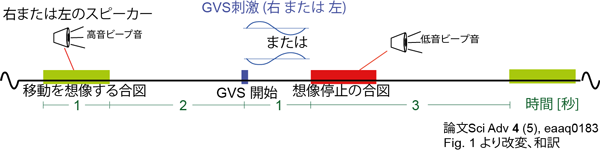
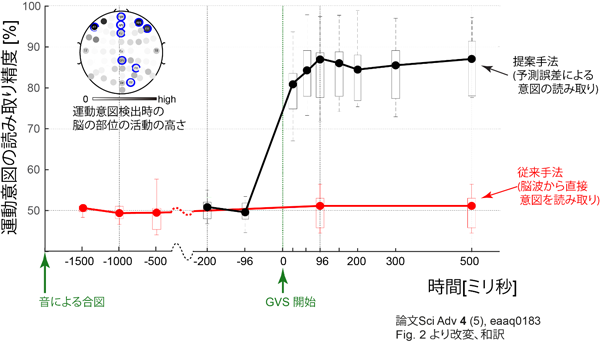
この手法を実証するため、車いすの操作を想定した左右の移動方向を識別する実験を行った。まず、左右にあるスピーカーのどちらかから、高音ビープ音を鳴らし、脳波を検出するセンサーとGVSを装着し、車いすに乗った被験者に音が来た方向に曲がる動きをイメージさせた。その2秒後に、GVSを用いて、平衡感覚をつかさどる前庭器官に、合図とは関係なく左右どちらかにランダムに曲がる動きを錯覚させる刺激を与え、脳波を測定した。低音のビープ音を合図に、被験者は動きのイメージを止め、一回の測定が終了する(図1)。これを複数回繰り返し、意図した方向と錯覚させた方向が合っているかどうかの正誤情報を、測定した脳波から検出するための統計的な解析を行った。脳波から検出した正誤情報と、GVSからの入力方向を照らし合わせて、被験者がイメージした方向を推定した。すべての被験者について、刺激を与えてから96ミリ秒という短い時間で、高い推定精度(87.2 %中央値)で運動意図を推定できた(図2)。なお、刺激は意識しきい値以下で、被験者が気づかない程度の弱い刺激であり、脳波から得られた正誤情報は脳により無意識に判別されたもので、被験者には追加の認知的負荷を与えていない。
この手法は、操作者の訓練を必要とせず、また操作者に認知的な負荷を強いることなく、従来よりも良好な精度で運動意図を推定できる。さらに、脳波の読み取りから推定までが、刺激を与えてから100ミリ秒未満で行えるため、リアルタイムで利用できる。
 |
|
図1 意図検出の手順 |
 |
|
図2 複数の被験者による意図検出の実験結果 |
|
脳信号から直接意図を検出する従来手法による意図の正答率を赤線、今回考案した手法による意図検出の正答率を黒線で示す。点(●)は、合図後の各時間での推定の正答率を示す。各点のボックスは正答率の25~75 %の範囲、誤差バーは全範囲を示す。左上の図は脳波の活動部位を示す(上が前頭側)。 |
今後は、今回提案した手法を運動意図の表明が困難な全身麻痺患者のコミュニケーションツールとして使用できるかどうか、臨床での試験を開始する。また、既存のBCIと併用することで、特に運動制御に関して機能を向上させるための研究を行う。
雑誌名:Science Advances
論文名:Utilizing sensory prediction errors for movement intention decoding: A new methodology
著者:Ganesh Gowrishankar, Keigo Nakamura, Supat Saetia, Alejandra Mejia Tobar, Eiichi Yoshida, Hideyuki Ando, Natsue Yoshimura and Yasuharu Koike
DOI:10.1126/sciadv.aaq0183
掲載日:平成30年5月9日