独立行政法人 産業技術総合研究所【理事長 中鉢 良治】(以下「産総研」という)知能システム研究部門【研究部門長 比留川 博久】松本 治 総括研究主幹 兼 スマートモビリティ研究グループ長、同グループ 富田 康治 主任研究員、橋本 尚久 主任研究員らは、モビリティロボットシェアリングシステムを開発し、茨城県つくば市【市長 市原 健一】(以下「つくば市」という)と共同で、産総研-つくば駅(つくばエクスプレス)間のモビリティロボットによる移動支援サービスの実証試験を開始する。
立ち乗り型モビリティロボットにGPSなどの各種センサーや情報提示装置を搭載し、予約システムや動態管理システム、充電ステーションとの連携によるシェアリングシステムを開発した。産総研と中央公園に設置した充電ステーション間で、産総研の職員が主に出張時に使用する。この実証試験は、ビジネス用途でのシェアリング運用に関する各種データを取得・蓄積・解析し、運用システムの検証やモビリティロボットシェアリングの実用化可能性の検討、さらには情報インフラを活用した移動支援サービスのモデルケースを提示することを目標としている。
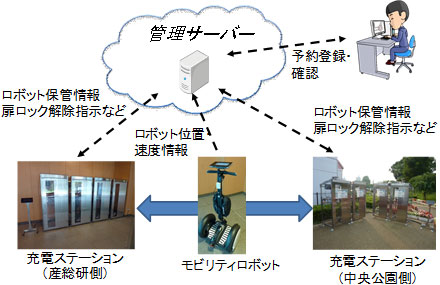 |
| モビリティロボットシェアリングシステムの全体構成図 |
最近、低炭素、省エネルギーなどに貢献する個人移動手段として、ロボット技術を活用した電動パーソナルモビリティが注目されてきている。特に、低炭素社会の実現に貢献する都市計画の一つとして、市街地中心部での移動を自動車に過度に依存しないコンパクトシティ構想が地方自治体を中心に提案されており、電動パーソナルモビリティは有望な移動手段として期待されている。
産総研では、2005年日本国際博覧会(愛・地球博)での来場者の体験試乗を目的として企業2社と共同開発した自律走行機能を持つ「インテリジェント車いす」の取り組み以来、ロボット技術を活用した車いす型や立ち乗り型のパーソナルモビリティの研究開発に取り組んできた。近年では、「つくばモビリティロボット実験特区」での実証試験活動や、「つくばチャレンジ」における市街地での長距離自律走行技術の実証など、特に実環境においてモビリティロボット単体での各種関連ロボット技術の実証を精力的に行っている。
つくば市では、2011年3月にモビリティロボットの公道走行実験を可能とする「つくばモビリティロボット実験特区」の認定を受け、2011年6月から産総研を含む各種モビリティロボットの実証実験が始まっている。また、つくば市は2013年3月に環境モデル都市に選定され、先進的な環境都市づくりを進めている。2030年までに市民一人当たりCO2排出量50 %削減を目標とした取り組みである「つくば環境スタイル:SMILE」では、「低炭素交通シェアリングシステム」の実現を掲げており、電動・省エネルギー型であるパーソナルモビリティや自転車、低炭素車などが、天候や用途、体力などに応じて市民が選択できる交通社会を目指している。
今回の取り組みは、モビリティロボットが社会に導入・普及する上での課題を解消するための研究開発であり、公共の場に充電ステーションを設置・運用し、自治体と共に実施する社会試験として位置付けられ、将来的には不特定多数のユーザーが手軽に利用できるモビリティロボットシェアリングの新しい形を提案するものである。
モビリティロボットにはGPSやドライブレコーダー、状態表示装置などを取り付け(図1)、無線通信によりサーバーと常に情報のやりとりを行う。サーバーには予約システム、動態管理システム(図2)が実装されており、ユーザーの予約情報に基づいて配車の調整を行うとともに、リアルタイムでモビリティロボットの位置情報を把握して、正常に運行されていることを確認できる。特に、利用時のサーバーとの位置情報の通信による周辺の安全情報などを提示することで、利便性や安全性などを向上させる点が特徴である。
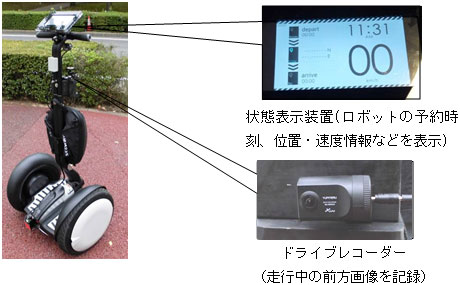 |
図1 状態表示装置などを搭載したモビリティロボット(セグウェイ) |
 |
| 図2 動態管理システム |
登録されたユーザーがWeb画面上で予約すると予約コード0とQRコード(図3)が発行される。予約時間に充電ステーション(図4、図5)の管理ポストで認証を行うと、予約したモビリティロボットが取り出せ、搭乗できる。もう一方の充電ステーションにモビリティロボットが近づくと、サーバーはGPSによる位置情報からモビリティロボットが近づいたことを認識し、充電ステーションに指示を送る。すると、該当ボックスの扉のロックが解除され、ユーザーはモビリティロボットをそこに返却して使用を完了する。
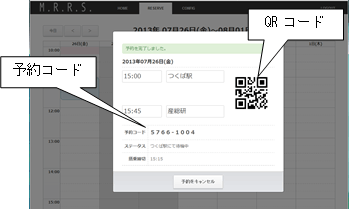 |
| 図3 予約時の予約コードとQRコードの発行画面 |
 |
| 図4 充電ステーション(産総研側) |
 |
| 図5 充電ステーション(中央公園側) |
今回の実証試験は、2013年9月から2014年3月までをシステムの試用期間として実施する。モビリティロボットとしてセグウェイ4台を用い、ユーザーは産総研知能システム研究部門の常勤職員とする。両ステーション間の距離は約3.8 kmであるが、セグウェイはフル充電での連続走行距離は約25 kmであるため、運用に支障はない。また、最高速度もつくばモビリティロボット実験特区の制限速度である10 km/hに抑えられている。
今後は、開発したモビリティロボットシェアリングシステムを運用し、運用状況データ、車載センサーデータ、および利用者からのアンケートを取得・解析・蓄積すると共に、今後のロボット運用システム開発へ役立てる。これにより、ロボットを活用したシェアリングサービス導入・普及のための知見を蓄積する。さらに、これらの実証試験により、モビリティロボットシェアリングサービスが安全かつ効率的に運用できることを実証し、導入を検討している自治体などへモデルケースとして発信していく。将来的には、モビリティロボットの種類を増やしていく予定であり、一般の方々に利用していただくことも検討する。