【2025年11月28日追記】
本プレスリリースで公開しているサービスは、http://openrtm.orgに集約しました。
以前本リリースで記載しましたサイトのうち、上記以外のサイトと産総研は無関係です。
独立行政法人 産業技術総合研究所【理事長 野間口 有】(以下「産総研」という)知能システム研究部門【研究部門長 比留川 博久】ソフトウェアプラットフォーム研究班【研究班長 原 功】、タスクビジョン研究グループ【研究グループ長 河井 良浩】、サービスロボティクス研究グループ【研究グループ長 松本 吉央】、インタラクションモデリング研究グループ【研究グループ長 浅野 太】らは、オープンソースライセンスで開発された知能ソフトウエアモジュール (RTコンポーネント)を次世代ロボットの基本的な機能である「作業知能」、「移動知能」、「コミュニケーション知能」ごとに整理し、「オープンソース知能ソフトウエアモジュール群OpenRTC-aist」(以下、「OpenRTC-aist」という)として、平成24年2月23日よりホームページ(http://openrtm.org)にて公開する。
OpenRTC-aistの実現により、これまで開発してきたRTミドルウエア OpenRTM-aist、RTコンポーネント開発ツール OpenRTP-aistとあわせて、次世代ロボットソフトウエア開発プラットフォーム ROBOSSA(Robot Software Suite, AIST)の開発を完了した。
ROBOSSAに含まれるソフトウエアは、OSや依存するライブラリーのバージョンアップなどに対する保守を継続し、新たに市販されるロボットへの対応も検討していく。これにより、次世代ロボットの研究開発基盤を簡便かつ低コストで実現できるようになり、新技術への早期取り組みが可能になると期待される。
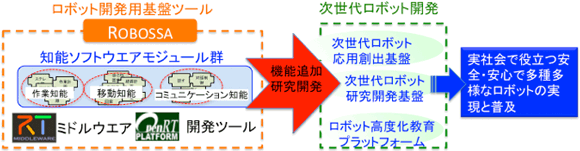 |
| ROBOSSAによる次世代ロボット開発基盤の実現 |
我が国は少子高齢化や労働力不足といった課題に直面しているため、人間共存環境を含めた実環境で活動するロボットの需要はますます拡大すると期待されている。しかし、現状のロボットでは、周りの状況を正確かつ迅速に理解し、状況に応じた対応をする技術が十分ではないため、実用化できる用途やその活用範囲は人間から隔離された工場のような限定的なものにとどまっている。
このような状況を打破するための最も重要な技術課題の一つは「知能化技術」であるという観点から、次世代ロボットに必要な作業、移動、コミュニケーションを行うための知的機能を共通部品化し、それを組み合わせることでさまざまなタイプのロボットを効率的かつ低コストで実現するための知能ソフトウエアモジュールの研究開発がさまざまな機関で進められている。しかし、開発された知能ソフトウエアモジュールは、その開発機関により有償・無償、ソースコードの公開・非公開などさまざまな形態で提供されるため、これらの知能ソフトウエアモジュールを利用したシステムを構築する場合に、利用条件や保守に関する取り扱いなどが複雑になるという問題があった。
産総研では、独立行政法人 新エネルギー・産業技術総合開発機構の委託事業「次世代ロボット知能化技術開発プロジェクト(平成19年度~23年度)」(知能化プロジェクト)により、知能ソフトウエアモジュールを開発するためのミドルウエア OpenRTM-aistとその開発ツール OpenRTP-aistの研究開発とあわせて、オープンソースライセンスによる作業知能ソフトウエアモジュール群、移動知能ソフトウエアモジュール群、コミュニケーション知能ソフトウエアモジュール群の研究開発にも取り組んできた。
また、知能化プロジェクトにおいてオープンソースライセンスで開発された各知能ソフトウエアモジュールと市販されているロボットを利用し、基本的な機能が備わったシステムの構成例を含むドキュメントの整備を進めてきて、このほどこれらをOpenRTC-aistとしてホームページにて公開する準備が整った。
これによって、開発基盤となるミドルウエア、知能モジュール開発ツール、知能ソフトウエアモジュール群がそろうことになり、次世代ロボットソフトウエア開発プラットフォーム ROBOSSA として平成24年2月23日よりホームページにて公開する準備が整った。
産総研では、知能化プロジェクトの成果であるさまざまな知能ソフトウエアモジュールを、次世代ロボットの知能基盤となる作業知能、移動知能、コミュニケーション知能の3つのカテゴリーで整理し、カテゴリーごとにオープンソースライセンスの知能ソフトウエアモジュールと市販のロボットを用いた基本的な機能をもつロボットシステム例を構築した。さらに、それぞれの知能ソフトウエアモジュールとロボットシステムに関するドキュメントの整備を行い、その利用方法を含めた情報発信を行えるように各知能ソフトウエアモジュールをパッケージ化して「OpenRTC-aist」を作成し、ホームページの整備を行った。
OpenRTC-aistに含まれる知能ソフトウエアモジュールは、知能化プロジェクトでオープンソースライセンスのもとで開発されたものを中心に、産総研が独自に開発した知能ソフトウエアモジュールを含んでおり、主なものとして「カメラで物体を認識し双腕で操る機能」、「安全に目的地に移動する機能」、「人間と対話し作業を実行する機能」をもつシステムの構成例がある。これらのロボットシステム構成例は、次世代ロボットシステムの知能基盤となるシステム構成であり、知能ソフトウエアモジュールの追加や改変などを行うことで新たな機能をもつロボットシステムを構築することが可能である。
これらのシステムを用いることで農業ロボットのような新たな産業応用の基盤(次世代ロボット応用創出基盤)、人間と共存して活動する技術など新たな技術開発を促進するための基盤(次世代ロボット研究開発基盤)、ロボット技術を教育するためのロボットプラットフォーム(ロボット高度化教育プラットフォーム)などを容易に実現できるようになり、こういったプラットフォームを利用した研究開発を行うことで、次世代ロボット開発における期間の短縮とコストの削減が期待される。
次世代ロボットの基本的な機能を集積した知能ソフトウエアモジュール群 OpenRTC-aistを作成したことにより、次世代ロボットソフトウエア開発のためのミドルウエアであるOpenRTM-aistと知能モジュール開発ツール群 OpenRTP-aistとあわせて次世代ロボットソフトウエア開発プラットフォーム ROBOSSAが整った。
【2025年11月28日追記】
本プレスリリースで公開しているサービスは、http://openrtm.orgに集約しました。
今後は、OpenRTC-aistの継続的な保守を行いつつ、産総研の研究成果で有用なものは、随時追加していく予定である。また、ROBOSSAに含まれるミドルウエア、開発ツール、知能ソフトウエアモジュールに関する問い合わせに対応するためのメーリングリストの整備やROBOSSA全体に対する質問などを包括的に対応することができるフォーラムなどの設置を行い、産業界への広範な普及活動および一元的かつ継続的な技術サポートを実施する予定である。