独立行政法人 産業技術総合研究所【理事長 吉川 弘之】(以下「産総研」という)情報技術研究部門 坂上 勝彦 部門長および同部門ユビキタスビジョン研究班【班長 依田 育士】佐藤 雄隆 研究員は、厚生労働省 国立身体障害者リハビリテーションセンター研究所(以下「国リハ研」という)の協力を得て、最新の画像センシング技術を用いたインテリジェント電動車いすを開発した。
自動車においては、追突の危険性を事前に予測して自動的にブレーキをかけたり、自動的に前走車に追従するなどのインテリジェントシステムが既に開発され、実用化されている。このような機能は障害者や高齢者がユーザーとなる電動車いすにおいても重要であるが、道路を走行する自動車と異なり電動車いすは人混みなどを含む様々な生活空間での共存が前提となるため、その実現のためには次世代のセンシング技術を用いる必要があった。
そこで、360度全く死角の無い全方向のカラー動画像と物体までの距離の情報(3次元情報)を、同時かつリアルタイムに取得する能力を持つ「全方向ステレオシステム」を電動車いすに搭載し(1)走行環境における危険検出(2)ユーザーを見守る機能など、ユーザーを支援するための様々な機能を持つインテリジェント電動車いすを開発した。
なお、本技術については、2006年9月27~29日に東京ビッグサイトで開催される第33回国際福祉機器展(H.C.R.2006)の国リハ研ブースで展示・発表する予定である。
|
|
|
 |
|
写真:インテリジェント電動車いす(左)と全方向ステレオカメラ(右) |
障害者や高齢者のQOL向上のための技術開発は社会的に重要な課題であり、まさに最先端のIT技術の活用が望まれる分野である。近年電動車いすの普及により、従来は外出が困難であった障害者でも、外出できるようになりつつある。しかし一方で、衝突・転倒や移動中突然の体調不良などの事故も増加しており、走行環境における様々の危険を検出し安全な走行を確保する機能とユーザーの意図や異常を機械がキャッチする「ユーザーを見守る」ための機能の実現が望まれている。
本研究は産総研と国リハ研などが中核機関となって推進している独立行政法人 科学技術振興機構(以下「JST」という)の科学技術振興調整費「障害者の安全で快適な生活の支援技術の開発」(2004年度~3年間)の一部であり、技術のみ先行するのではなく、ユーザーに関する深い知識を持つ国リハ研とのディスカッションを生かしながら開発が進められている。
なお、全方向ステレオシステムは、JSTの岐阜県地域結集型共同研究事業(産総研 佐藤 雄隆 研究員が前職で参加)で世界に先駆けて開発されたカメラシステムで、今回のプロジェクトにおいてその先端的成果の障害者支援への応用に関する研究が行われた。
今回開発した主な機能は以下のとおりである。
(a) 走行環境における危険(壁・机・歩行者などの衝突対象や、段差・下り階段などの落下・転倒対象)を全方向にわたって同時に検出し、危険が認められる場合に減速および停止制御する。
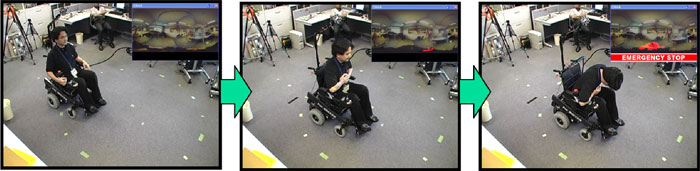
(b) ユーザーの乗車姿勢を検出し、通常と異なる姿勢であると認められた場合に緊急停止し、携帯電話等で外部に自動通知する。また、手振りなどのユーザーのジェスチャーを認識し、電動車いすを制御する。
(c) 全方向カラー動画像を無線LAN経由で外部にリアルタイムで配信する。
図1に全方向ステレオシステムによって撮影された全方向画像の例を示す。画像は毎秒15コマの動画で、パノラマ画像表示のほか、地球儀を回すように球を回転させて全方向を見回すことができる。全方向ステレオシステムは全く死角を持たないため、ユーザーの頭上から電動車いす周囲の環境を完全に把握できるだけでなく、ユーザーの乗車姿勢をも同時に観測することができる。
図1  |
|
(a)パノラマ動画表示(世界地図と同様のメルカトール図法で全球を表示) |
(b)球面動画表示(地球儀を回すように球を回転させて任意の方向を見ることができる.中心の人物は電動車いすに座っているユーザー.) |
図2は走行環境危険検出の一例で、バック中ユーザーは後方が見えていないが、全方向の3次元情報により後方に現れた人物を検出、衝突の危険があるため電動車いすは自動減速・停止する。
図2
 |
|
(a)バック中(ユーザーは後方が見えていない) |
(b)後方に人を検出し自動減速 |
(c)衝突の危険があるので自動停止 |
|
|
図3はユーザーの乗車姿勢を3次元情報で検出、通常と異なる乗車姿勢が検出された場合には、緊急停止する。また図4は、ジェスチャー認識の一例で、ユーザーが手を伸ばし続ける動作をジェスチャーとして検出し、手が届く位置まで自動的に前進する。
図3
 |
|
|
図4
 |
|
(a)手を伸ばし続けるジェスチャーを検出し,アシストモードに移行 |
(b)電動車いすが自動的に前進.手を伸ばしている間前進し続けるが,危険検出も同時に行っているので,机に衝突することはない. |
(c)目的のものを把握しアシスト終了. |
|
|
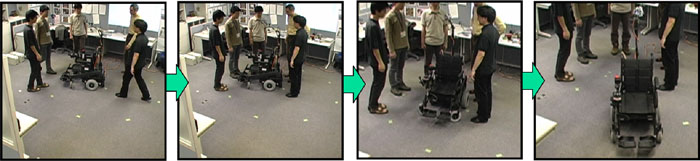
その他、図5は人混みを想定した周囲状況の検出能力の確認実験である。全方向の3次元情報をリアルタイムに取得しているため、移動可能な方向を瞬時に判断することができる。
図5
 |
今後は、実走行実験を重ね、走行環境危険検出機能の高度化を進める。また、今回開発した試作機は全方向のカラー動画を無線LANで外部に配信する機能を持つが、今後は携帯電話回線で配信する実験を行い「遠隔支援」機能の可能性について検討を行う予定である。