独立行政法人 産業技術総合研究所【理事長 吉川 弘之】(以下「産総研」という)と、独立行政法人 新エネルギー・産業技術総合開発機構【理事長 牧野 力】(以下「NEDO技術開発機構」という)は共同で、恐竜型二足歩行ロボット(以下「恐竜型ロボット」という)」を開発した。
開発した恐竜型ロボットは、平成17年3月25日から愛知県で開催される「愛・地球博」(2005年日本国際博覧会)において、NEDO技術開発機構及び財団法人2005年日本国際博覧会協会【会長 豊田 章一郎】(以下「博覧会協会」という)が共催で行うロボットプロジェクトの一環として、長久手会場「遊びと参加ゾーン」のロボットステーションで、開催全期間の185日間を通して展示・運用する計画である。
今回開発した恐竜型ロボットは、NEDO技術開発機構が産総研と共同で実施した「人間協調・共存型ロボットシステムの研究開発(Humanoid Robotics Project (HRP)」(以下「HRP」という)で開発された技術を活用して開発が行われた。
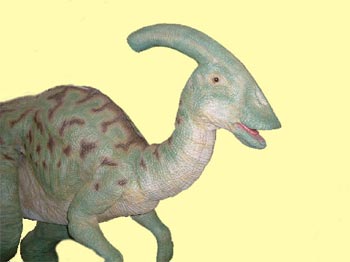
開発した恐竜型ロボットは、前後方向が長さ3.5 m、体重が約80 kgで、外観は肉食のティラノサウルス(T.Rex)と、草食のパラサウロロフスの2種類(各1体)である。軽量高剛性の内骨格構造の開発により、リアルな外観を持ちつつ軽量な恐竜型ロボットが実現された。ティラノサウルス型ロボットは総関節数が27軸、パラサウロロフス型ロボットは総関節数が26軸で、恐竜の関節構造がかなり忠実に再現されている。また、歩行動作は最新の恐竜の学説を参考にして、HRPにおいて開発された二足歩行ロボットの制御技術を適用することにより再現されている。
恐竜型ロボットの開発に当たっては、HRPの開発成果を活用して、産総研は2体のロボットの設計と1体のロボットの製作を担当し、NEDO技術開発機構は1体のロボットの製作をそれぞれ担当した。ロボットの動作制御ソフトウェアは、産総研がHRPにおいて開発した成果を恐竜型に対応して改造したものを利用し、また、ハードウェアは、HRPにおいて開発した技術を活かし、川田工業株式会社【代表取締役社長 多田 勝彦】(以下「川田工業」という)に依頼して製作した。
今回の恐竜型ロボットの開発は、二足歩行ロボット技術を早期に産業化するための第1歩と位置づけられ、「歩く」エンターテインメント用ロボットを実現する際の標準的な方式となることが期待される。
|
|
 |
|
写真:ティラノサウルス型ロボット(左)とパラサウロロフス型ロボット(右)
|
1996年の本田技研によるP2の発表以降、我が国は二足歩行ロボットの研究開発の一大エポックを迎えている。本田技研、ソニー、川田工業、トヨタ等が相次いで完成度の高い二足歩行ロボットを開発し、また、NEDO技術開発機構においても、HRPにより、多様な動作が行えるヒューマノイド型の二足歩行ロボットを開発しており、我が国の二足歩行ロボット開発技術は世界を大きくリードする技術となっている。
また、次世代ロボット産業は21世紀初頭において大きく成長する産業として期待されているが、これまで次世代ロボットとして成功し、1つの製品で100億円以上の売上を記録したのは、ソニーのAIBO、米国iRobot社の家庭用掃除ロボットRoombaの2つにとどまっている。
次世代ロボットの中でも特に二足歩行ロボットの産業化は容易ではない。産業化を阻む主な理由として、歩行するだけでは商品価値が乏しいこと、単価が高いこと、転倒すると大きく破損すること、の3点が挙げられる。
しかしながら、今回開発した恐竜型ロボットの場合、現状の機能としては歩行するだけではあるが、博物館等のアミューズメント市場での需要が見込まれること、内骨格型構造で表面を柔軟な素材で被覆しているため、転倒しても破損は最小限で抑えられることから、早期の商品化が期待できるロボットと考えられ、二足歩行ロボットのエンターテインメント分野への応用の第一歩となるものと位置づけられる。
NEDO技術開発機構と産総研は、平成10年度から平成14年度まで「人間協調・共存型ロボットシステムの研究開発(Humanoid Robotics Project(HRP))」【プロジェクトリーダー 井上 博允(当時東京大学教授、現在日本学術振興会)】を実施し、人間型ロボットの基盤技術の開発を行うとともに、様々な分野への応用可能性の実証を行った。この中で、産総研は基盤ソフトウェアの開発を担当した。
恐竜型ロボットの動作制御ソフトウェアは、産総研がHRPにおいて開発した成果を恐竜型に対応して改造し、ハードウェアは、HRPにおいて開発された技術を活かし川田工業が製作している。また、ハードウェアの一部については、本田技研 が独自に開発した技術を同社の特許権を実施することにより製作している。以上の経緯を踏まえて、HRPの成果の活用を目的に、産総研は愛・地球博に協力する事業の一環として、NEDO技術開発機構はロボットプロジェクトの一環として、本恐竜型ロボットの開発を行った。
これらの恐竜型ロボットは、NEDO技術開発機構及び博覧会協会が共催で行うロボットプロジェクトの一環として、「愛・地球博」の長久手会場「遊びと参加ゾーン」に位置するロボットステーションにおいて、開催全期間の185日間に渡って展示・運用する計画である。
今回実現された軽量高剛性の内骨格構造は、恐竜型ロボット以外への応用が可能で、「歩く」エンターテインメント用ロボットを実現する際の標準的な方式となることが期待される。