保全が容易な原子力プラントの実現を念頭に、原子力プラントの運転状況をまるごとディジタル化し、長期にわたって維持・提示する技術(保全情報場技術)を開発した。これによって、超早送りや過去にまでさかのぼる表示など、これまでみえなかったものがみえるようになった。この技術は、人による運転・保全を手助けする技術として、プラント異常の兆候早期発見の促進、メンテナンスコストの削減を可能にする。
本研究は、独立行政法人 産業技術総合研究所【理事長 吉川 弘之】(以下「産総研」という)、独立行政法人 理化学研究所【理事長 野依 良治】(以下「理研」という)、独立行政法人 海上技術安全研究所【理事長 中西 堯二】(以下「海技研」という)の3研究機関が、原子力基盤クロスオーバー研究(以下「クロスオーバー研究」という)ソフト系科学技術交流委員会【主査 佐藤 知正 教授(東京大学)】のもとで連携協力して行った。
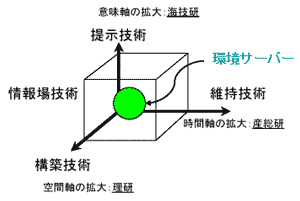
保全情報場技術は、仮想環境を情報蓄積の場とする技術(それをシステムとして実装したものを環境サーバーとよぶ)を核として、理研が移動ロボットにより仮想環境に情報を獲得する技術(構築技術)を、産総研がその情報を仮想環境に蓄積し長期にわたり維持する技術(維持技術)を、海技研が仮想環境に維持されている情報をプラント保全のために効果的に提示する技術(提示技術)を、各技術に相当する空間軸・時間軸・意味軸を単独に伸ばすのではなく、それが包含する体積を拡張するよう協調しながら技術開発を進めたことで実現した。
3研究機関は保全情報場技術の有用性を示すため、産総研内に製作した原子力プラント内部のモックアップを実験対象に保全情報場を構築し、原子力プラントにおいて異常の兆候が発生した状況を想定したデモンストレーションを行った。
原子力プラントでは安全な運転・保全のためにプラント内に配置した様々なセンサーや、巡回点検によりプラントの点検情報を得て運転状況の把握に努めている。それらの情報の一部は何らかのメディアに記録として残され、後日のレビューに供されることはあるが、すべての情報を統合的に蓄積、管理し、オンラインで現状と過去の状態を比較したり、過去の情報を多角的に提示することは実現できていない。
そこで、IT(Information Technology)として急速に発展した計算機技術、AI(Artificial Intelligence)技術やネットワーク技術、RT(Robotics Technology)として脚光を浴びているロボット技術を有機的に融合させることにより保全する場をまるごとディジタル化し、みられなかったところやみえなかった過去との差分をみえるようにするための基盤技術を開発することにした。
本研究はクロスオーバー研究として実施した。第1期(平成元年度~5年度)では、「原子力用人工知能」分野において、「原子力用人工知能を具備した原子力施設のシステム評価研究」が実施され、第2期(平成6年度~10年度)には、「原子力用人工知能」に、「知的活動支援」という新分野が加えられ、「自律型プラントのための分散協調知能化システムの開発」、「原子力施設における知的活動支援の方策に関する研究」が行われた。そして、現在の第3期(平成11年度~15年度)には、これらの2分野が「ソフト系科学技術」分野として統合され、「人間共存型プラントのための知能化技術の開発」を行うこととなり、3研究機関が、関連大学、関連企業の専門家を加えて構成したソフト系科学技術交流委員会のもとで、保全情報場技術の研究を進めてきた。
研究は保全情報場の構築・維持・提示技術を各研究機関が分担して進めたが、3年目(平成13年度)からは環境サーバーを核として個々の研究成果をシステム化することで研究をすすめ、最終年度となる本年度には産総研に製作した原子力プラント内部のモックアップを実験対象にシステムを実装し、プラントの実際の運転状況を模擬した環境で情報の蓄積や提示の実験を重ねてきた。
本研究を終了するにあたり、これまでの研究成果を集約したデモンストレーションを構築し公開実演することとした。シナリオは実際の現場で聞き取った問題点を意識して作成したもので、あらすじは次のとおりである。
(1) 通常時におけるカメラによるデータ収集と蓄積
プラント内に固定されたカメラを用い、パンチルト架台によってカメラを動かしながら、可視画像と熱画像を取得し、環境サーバー内に機器表面の温度データなどを蓄積する。
(2) 異常の兆候の監視・発見・チェック
巡回点検監視エージェントプログラムが、あらかじめ設定した配管のフローに沿って、環境サーバーが管理する仮想環境内で配管を移動しながら、異常の兆候がないかどうかを自動的にチェックする。異常の兆候が発見されると、プラントオペレーターがパーツ検査エージェントの助けを借りて環境サーバー内の仮想環境上で異常の兆候を詳細にチェックする。
(3) 移動ロボットによるデータ収集
固定カメラから見えない上部配管の異常の兆候を調べるために、移動ロボットを出動させる。ロボットオペレーターは移動ロボットを遠隔操作しながら、疑わしい部位の画像を取得する。環境サーバーにより仮想環境に蓄えられたその画像を、パーツ検査エージェントによりチェックして、この部分が異常の発生場所であると確認する。
上記、デモンストレーションの詳細、および、それを実現している研究成果の内容については、クロスオーバー研究ソフト系科学技術交流委員会が作成した「原子力プラントのための保全情報場技術」説明資料を参照されたい。
現場の問題点を意識したデモンストレーションにより、保全情報場技術が実際の現場でも有用な基盤技術になりえることを示せた。第3期クロスオーバー研究は本年度で終了するが、電力会社やプラントメーカーとの共同による具体的応用開発への展開、この成果を基礎とした新プロジェクトの立案などへ結びつくことが期待される。
本研究の一部は、原子力委員会の評価に基づき、文部科学省原子力試験研究費により実施した。