マイクロマニピュレータ日本文化との関係!?
2020年9月更新
作:谷川民生
技術の進化論!?
生物は大きくなる方向へ進化するようで、6千5百万年前に滅亡した恐竜は、なんと20~30メートルなんていうのもいたようです。
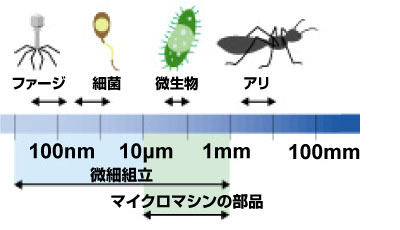
一方技術は小さくなる方へ進化するようで、先端技術の世界ではnm(ナノメートル)という単位が当たり前のようになってきています。ナノメートルというのは1メートルの10億分の1、ということは1ミリの百万分の1ということになります。
特に工学分野、医療分野、生物分野では扱うものが小さくなってきており、その小さいもの(微少対象物)の操作、加工、組み立てといった細かい作業(微細作業)が求められているのです。でもそんな微細な操作を人間の手で行うことは不可能です。なにしろ目に見えないくらい小さな世界のことなのですから。
では、どうしたらいいのでしょうか? マンガや映画のように人間が小さくなって作業をすることが出来ればいいのですが、そんなことはそれこそマンガや映画の世界での話。人間が小さくなれないのであれば、人間と同じような機能を持った、小さな小さな動きの出来る手を作ればなんとかなりそうです。
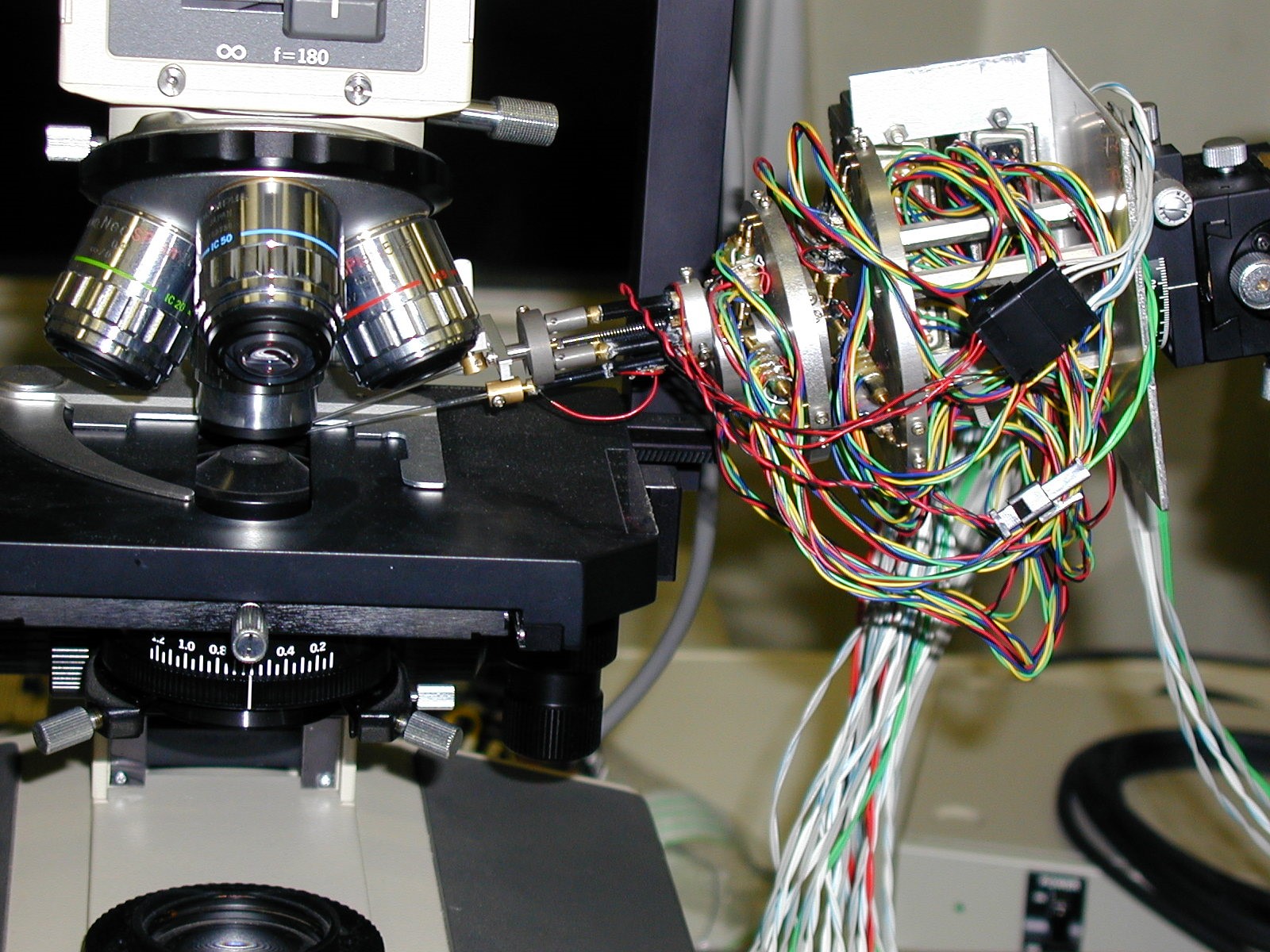
そこで開発されたのが「マイクロマニピュレータ」。マニピュレータというのは、“あやつる人”とか“操縦者”といった意味で、自動車工場などで組み立て作業を行っている工業用ロボットにも、このマニピュレータが使われています。
と、簡単に書きましたが、微細の世界では自動車の組み立てロボットのようにはいきません。なにしろ通常環境(マクロ環境)と微細環境(マイクロ環境)とでは、支配する物理法則が大きく異なるのです。
一般の認識では、物理法則が通常の世界と微細な世界で違うなんて、なんだか納得出来ないですよね。でも実際にそうなんです。ですから、普通のサイズのマニピュレータをただ小さくすればいいということではないのです。それに、ある程度の大きさがなければ実現出来ない技術もあります。
この技術があると、人間の血液を流れる白血球もつかむことができます。また、小さい部品をつまんで接着して組み立てることもできます。
このように、人間が直接つかむことができない、生物分野での細胞操作や、機械分野での非常に小さい部品を組み立てることが可能になるのです。
とにかく、いろいろなハードルを越えて実現したマイクロマニピュレータ。顕微鏡下の世界で作業を行うなんて、まさにテクノロジー界のゴッドハンド(神の手)と言えそうですね。
モノを離すのが難しい!?
通常の環境、つまり私たちが普通に目で見ている世界では、重力の影響により、モノをしっかりつかむには3本以上の指が必要です。一方、微細世界では重力などの影響が少なくなり、同時に表面同士が引きつけ合う力が増すために、モノ(対象物)が指に吸着する現象が起こります。
つまり、モノを運ぶだけなら1本の指でも十分で、さらにもう1本の指が加わるだけで、モノを回転させたり離したりすることの出来るマニピュレータを作ることが可能となります(ちなみに、重力の影響が少なくなるのは100ミクロンレベルあたりからと言われています)
上部に伸びた2本の指でモノを吸着し、回転したり離したり操作する
この場合、各指の先端が、前後、左右、上下に直線運動出来ることが最低必要で、さらに微妙な動きをさせるためには、固定された支点に対して上下、左右に動く回転(手首を動かす感じ)と、ひねりの回転運動(時計の針のような運動)が必要になります。特に、モノが自然にくっついてしまう微細世界ではモノをつかむことは何でもないことなのですが、一度つかんだモノを離すことは、とても難しいことなのです。いわば、微細世界はベタベタした世界なのです。で、そのベタベタした世界でモノを離すのに必要なのが、指先の微妙な動き。
例えば、指についたご飯粒を落とすには、2本の指をずらしたり、そっとご飯粒を指で押したりと、指の微妙な動きが必要ですよね? 微細世界でモノを自由に扱うには、そんな繊細な動きが必要なのです。
パラレルメカニズムってなんだ?
2本指で微細作業を行うには、指の動きの自由度が高いこと、そして高い精度で指の位置を決めるメカニズムが必要です。2本指マイクロハンドに求められる機能をまとめると、
- 指先の並進運動(前後、左右、上下の直線運動)か、並進と回転の両方の運動が出来ること
- 数ミクロンの対象物を操作出来る精度を持っていること
- 顕微鏡を見ながら操作するので、メカニズムが数センチ以下であること
ということになります。
ところが、今までのマニピュレータに使われている、人間の腕のように部分が直列につながっているメカニズムでは、指の部分(エンドエフェクタ)を十分に小さくしながら、さらに回転運動まで含む器用な動きを実現することは、技術的にとても難しいのです。
そこで着目されたのがパラレルメカニズムです。
パラレルメカニズムは関節によっていろいろな動きを作り出すのではなく、同じ平面の上に、それぞれの駆動リンクが並列に結合されているのです。例えて言えば、首の筋肉が頭を支え、なおかついろいろな頭の動きを作り出しているような感じです。
パラレルメカニズムには次のような特徴があります。
- 多自由度の動きが、コンパクトな機構で簡単に実現出来ること
- 位置決め精度が高いこと
- 逆運動学が単純で、動作制御が簡単なこと
唯一の欠点は可動範囲が小さいということですが、作業範囲は顕微鏡でのぞく範囲に限られるので、さして問題にはなりません。
はし文化の知恵
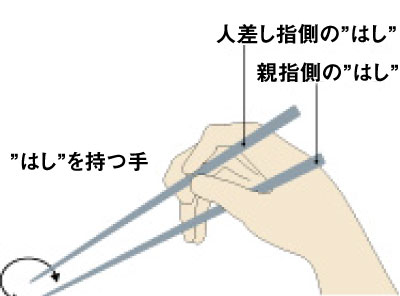
みなさんは“はし”を上手に使うことが出来ますか? 小さい頃からスプーンやフォークばかり使っていて、うまく使えない人もいるんじゃないですか? 自分ではうまく使っているつもりでも、変な持ち方をしていると“はし”がバッテンになったり、豆を一粒ずつつまめなかったりしますよね。
ところで、“はし”の正しい使い方は、1本の“はし”を親指の付け根で固定し、残りのもう1本を人差し指と中指ではさんで自由に動かします。つまり、固定された1本の“はし”に対して、もう1本の“はし”が自由に動くわけです。2本の“はし”が自由に動くより、片方の“はし”が固定されていた方が、より安定した細かな作業が出来ます。
実は、マイクロマニピュレータもそれと同じで、1本の手は固定され、もう一方の手が自由に動くようになっているのです。このはしと同じ動かし方によってマイクロマニピュレータの2本指は白血球の操作もできるのです。
(白血球は直径約10ミクロン)
つまり、2本指(棒)でものをつかんだり離したりするのには、“はし”の正しい持ち方が一番合理的であることが偶然にも証明されたわけです。最先端技術の結果が日本の伝統的な“はし文化”に行き着くなんて、意外ですよね。
さて、なぜ「正しく“はし”を持ちなさい」と言われるか、お分かりになりましたか? そこには、日本の“はし文化”が築き上げてきた知恵が、ちゃんと反映されているってことなんです。
カギは伸び縮み?
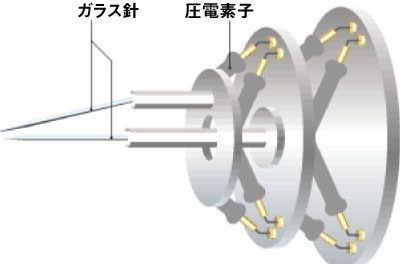
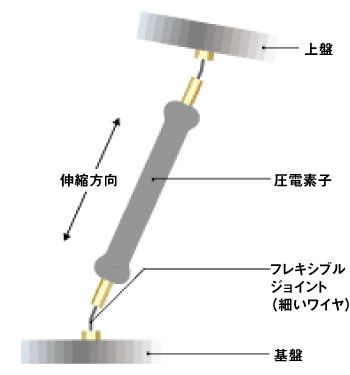
マイクロマニピュレータは、パラレルメカニズムによって自由な動きが実現されることは分かりましたね。では、そのメカニズムを動かす原動力は何なのでしょうか?動力源の条件としては、小さいこと、そしてシンプルなことが挙げられます。いろいろ候補はありましたが、その中でもっとも適していたのは「圧電素子」と呼ばれるものでした。大きさは長さ10ミリで直径は2ミリ×3ミリ程度の部品です。
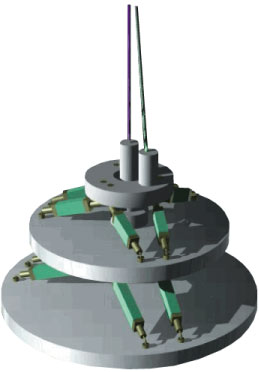
圧電素子は電気を加えると形が変わる性質を持っています。つまり電気の力によって、大きく(長く)なったり、小さく(短く)なったりします。実際のマイクロマニピュレータは、3つの円形のプレートがそれぞれ6つの圧電素子によって固定されています。その圧電素子のそれぞれの伸び縮みによって、プレートが微妙に動き、それに伴い指も動くというわけです。
もし、人間の腕のように部分が直列につながっているメカニズムを使ったとしたら、微妙な誤差が先に行くに従って大きくなってしまい、微細な世界ではとても通用しません。その問題を解消したのがパラレルメカニズムであり、パラレルメカニズムを支えているのが、圧電素子ということになります。
部品よりも小さいサイズの接着剤
顕微鏡の下で微細な構造物を作るには、組み立てるときの接合技術、つまり、小さなモノと小さなモノをくっつける技術がとても重要です。接合にはいろいろな手段が考えられますが、産総研では、素材の制限を受けにくい接着剤による接合技術を検討しています。
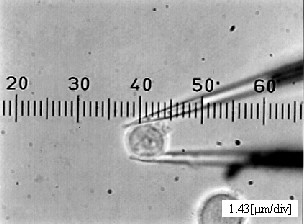
対象となる部品は数ミクロンサイズなので、接着剤の量も同サイズ以下が要求されます。その条件をクリアするための手段として、中空で内側にガラス繊維が入っているガラス針を使用し、毛細管現象(植物が根で水を吸い上げる原理)を利用して、適切な量の接着剤を取り出すことを考えました。
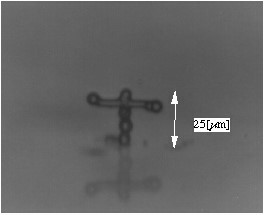
接着剤がガラス針の中に入ってくるスピードは目で確認出来る程度なので、顕微鏡観察で希望する量の接着剤が針に入ったときに、接着剤から針を離せばいいわけです。その後、目的とする位置に針を移動させ適当な圧力を加えれば、接着剤はすべて押し出されます。結果として直径2μm、つまり1mmの5百分の1の直径の接着剤を、マイクロマニピュレータによって扱うことに成功しました。

遺伝子研究の発展を支える!
マイクロマニピュレータの活躍が期待されるのは、工学分野、医療分野、生物分野などの世界。言ってみれば、今最も注目を浴びている最先端分野を支える技術だと言えます。
その中でも特に活躍が期待されるのは、バイオテクノロジー分野での細胞遺伝子操作。遺伝子は、アデニン、グアニン、シトシン、チミンという4種類の塩基と呼ばれる化合物で出来ています。そして、その塩基の組み合わせで情報の内容が決定されます。ですから、遺伝子を操作するということは、この化合物を操作することになるわけです。
平成12年(2000年)にその配列がほぼ明らかにされた遺伝子は、次の段階、つまり、機能解明や医療分野での応用へと発展していくことが期待されています。

「微細の世界では、思っても見ない現象がいくつも現れてきます。そこが研究の難しさであり、楽しさでもあります。」(谷川民生博士)