どうなる!?クルマの運転の未来運転科学の最前線
2020年8月掲載
作:佐藤稔久
百年に一度の大変革期
クルマの「自動運転」という言葉を聞いたことがあるでしょうか?ニュースやテレビのコマーシャルで、自動運転に近い言葉を見たり聞いたりしたことがあると思います。
自動車業界は、今、100年に一度の大変革期にあると言われています。

photo by Adobe Stock
自動車を中心とした移動手段における色々な技術が、研究開発の段階から実際に世の中で使えるレベルに変わってきて、クルマの乗り方、何人かでクルマをシェアするような使われ方、交通社会の制度までもが変わろうとしています。
100年前には何があったでしょうか?
自動車を大量生産できるようになり、クルマが民衆に広まってきた時代がおおよそ100年前です。それまでは、移動手段として馬車が一般的に使われていたのに対し、現在では当たり前のように使っているクルマが、多くの人々にとって身近なものになってきたのが、おおよそ100年前といえます。
実は現在も計量法ではメートル法に基づく仏馬力が内燃機関の工率の単位とみなされています。
photo by Adobe Stock
その身近なものとして使われ続けてきたクルマの運転の仕方そのものが変わろうとしています。本コラムでは、運転がどのように変わろうとしているのかを、それを支える研究事例を交えて紹介します。
クルマを運転するとは
クルマを運転することを3つの段階に分けて考えてみます。
段階1はドライバー(運転者)がハンドルを回したり、アクセルペダルやブレーキペダルを踏んだりする動作です。
段階2は、段階1のような動作で、前のクルマとの距離を適切に保ったり、ある速度をキープしたり、一時停止したり、交差点で停止したり、カーブを曲がったり、交差点で右折や左折をしたり、そして、駐車をしたりします。
段階3は目的地までどの道を通るのかを考え、どの交差点で曲がるのかを思い描きます。さらに、“どのような運転をするのか”を考えて、それを実践します。例えば、急に雨が降ってきたので、いつも以上に周りに注意を払ったり、早めにブレーキをかけようと思ったり。または、落とすと壊れるかもしれない荷物をクルマに載せているので、いつも以上に急な加速や減速をしないように気をつけたりします。
| 段階 | 運転行動 | 例 |
|---|---|---|
| 3 | 運転の戦略 |
|
| 2 | 道に合わせて、 他の交通参加者にぶつからないように、 クルマをコントロール |
|
| 1 | クルマをコントロールする動作 |
|
どこまで自動でやってくれるのか?
自動運転は、どこを自動でやってくれるのでしょうか?
多くの人が自動運転と聞いて思い浮かべるであろう姿は、“出発するときに目的地を入れてスタートを押すと、あとは自動運転システムが全てやってくれて、目的地に着いたら教えてくれる”というものであるかもしれません。
これは、段階1~3を全てやってくれる、いわば完全自動運転です。しかし、このような自動運転が世に出てくるのは、数十年は先と言われています。この10年以内に身近なものになるであろうと言われている自動運転システムは、段階1と段階2の一部を自動運転システムの“やれる範囲”でやってくれるものです。
自動運転システムというのは、人間の目の代わりとしてカメラや通信を使って周囲の状況(前のクルマとの距離など)を知り、その状況に応じて適切にハンドルやペダルをコントロールします。自動運転システムのやれる範囲というのは、カメラや通信で状況を知ることのできる範囲であり、ある状況で適切にコントロールできる範囲となります。
そして、例えば「高速道路のみ」など、自動運転システムが使える範囲が決められている場合もあります。この10年以内に世の中に普及してくるであろう自動運転システムは、このようなやれる範囲を超えるような場合には、「運転交代して」と、ドライバーに運転を変わってもらうシステムとなります。
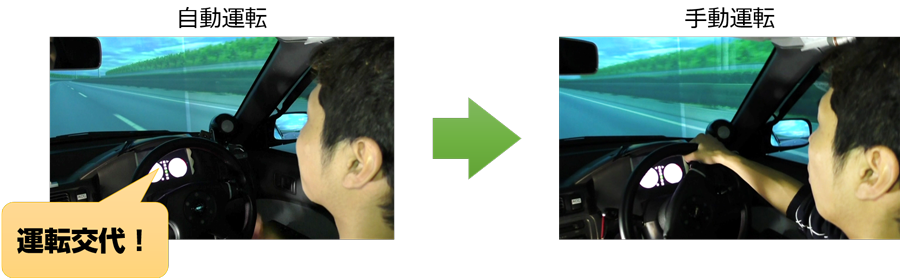
走っている途中で運転交代するなんて危ないと思われるかもしれません。しかし、運転交代するたびに、毎回クルマをいったん止めていたのでは、道の中でのクルマの流れが悪くなってしまいます。走りながらでも運転交代するためには、ドライバーが運転を交代できる状態にあるかどうかを自動運転システム側が把握して、運転交代できない状態になった場合には、その状態から運転できる状態に戻すように働きかける仕組みが重要となります。

いろんなドライバーの状態を把握する
自動運転システムが世の中で使われるためには、自動運転システムが周囲の状況を知り、その状況で適切にコントロールできるというセンシングや制御という技術に加えて、システムがドライバーの状態を把握する(ドライバーモニタリング)技術が必要となります。
ドライバーの状態と一言でいっても、次のような種類があります。
- A. 目的地までの経路を把握している状態
- B. 周囲の道の構造や周りのクルマの動きを把握している状態
- C. 目の前のクルマの動きのみを把握している状態
- D. 前を見ている(目線は前方にある)ものの、運転以外のことを考えている状態(意識のわき見)
- E. 前を見ていない状態(わき見)
- F. 目をつむっている=眠くなっている状態
- G. 運転の姿勢を取っていない状態
自動運転中、ドライバーはAからGのどれかの状態になっている可能性があります。運転交代をするためには、どの状態になっている必要があるでしょうか?
“ちょっと今、運転代わって”と、段階1や段階2をさしあたり実行するにあたって、Aの状態にまではなっていなくても良さそうです。BやCの状態であれば、自動運転システムから運転を変わって、周囲の状況に応じてハンドルを切ったり、ペダルを踏んだりできそうに思われます。
DやEの状態ではどうでしょうか?
自動運転を使っている間、自動運転システムがハンドルやペダルの操作をしてくれますので、ドライバーは運転以外のことに意識を向けたり、前を見ずにメールを見たり、読書をしたり、映画を見るなどする可能性があります(DやEの状態)。また、眠くなってうとうとしてしまうかもしれません(Fの状態)。
そのため、D、EやFの状態の場合、その状態になっていることをどのようにシステムが把握するのか、また、その状態がどれくらいまで深いと適切に運転交代をすることができないのかを明らかにすることが必要不可欠となります。

ドライビングシミュレータの出番
ドライビングシミュレータというクルマの運転をバーチャルな環境で行えるように模擬した実験装置を使って、これを明らかにするための実験が世界中で行われています。

DやEの状態をわざと作り出すように、人間工学や心理学の分野で、これまでに運転以外の場面などで使われてきた考え事をさせるような課題や、車内のディスプレイを見させるような課題を自動運転中のドライバーに与え、ドライバーの脳波、視線、目の動き、まぶたの動き、心拍などを計測します。また、自動運転から手動運転に運転交代した後の運転操作も計測します。
ここでは、運転交代後の障害物を避ける際のハンドルを切るタイミング・切り方や、避けた後のクルマのふらつき具合、ペダルの踏み方等を計測します。そして、自動運転中の計測データと運転交代後の計測データを比べて、運転交代後の計測データが危険な運転を示してしまうのは、自動運転中の計測データがどのような値を取っている場合かを分析するといった研究の流れです。
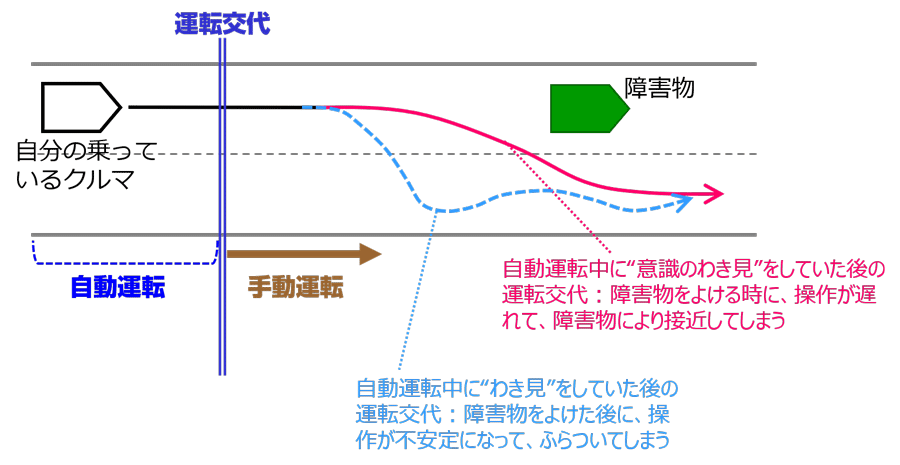
一見同じように考えられるDとEでも、最近の研究により、運転交代してハンドルを持った後の行動に違いが見られることが分かってきました。
具体的には、自動運転中に意識のわき見をしていると、運転交代した後、障害物を回避する場合に、回避操作に遅れが見られ、障害物により接近して回避することになってしまうこと、また、自動運転中にわき見をしていると、運転交代した後、障害物を回避した後にクルマがふらついてしまうことが分かってきました。自動運転中にドライバーのやっていることが違うというのは、脳の活動や身体の準備状態も異なりますので、手動運転に切り替わってからの運転行動にも違いが出てしまうようです。
そして、自動運転中に意識のわき見やわき見にどれくらい没頭しているのかは、カメラを使ってドライバーのまぶたや眼球の動きを測ることによって、推定できることも分かってきています。
このような関係が分かってきますと、運転交代後に、障害物により接近しすぎると衝突する可能性がとても高くなってしまう、または、障害物を回避した後にふらつきが大きくなってしまうと車線をはみ出してしまうかもしれないという結果を予想して、そうならないためには、自動運転中の意識のわき見やわき見をどの程度に抑える必要があるのかを予測する技術につながります。
反対にドライバーもシステムをわかってないと
自動運転中に、自動運転システムがドライバーの状態を知ることは大切ですが、ドライバーが自動運転システムの状態、特に、システムがどのようにクルマをコントロールしようとしているのかを知ることも必要です。
自動運転とは、自分の運転していないクルマに乗っているということであり、助手席や後部座席に乗っているのと同じといえます。人の運転だと落ち着かないことや、乗り物酔いを感じてしまうことがあるように、自分が操っていないクルマに乗っていると快適性が損なわれることは多々あります。これは、人が何を見て、どう判断して、ハンドルやペダルを動かそうとしているのかが自分からは分からないことが原因の一つと考えられます。
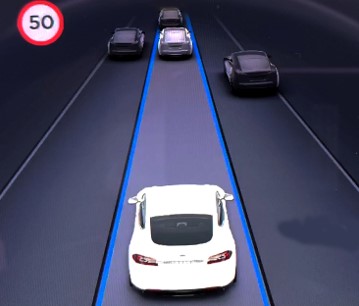
自動運転システムが何を見ているのかについて、カメラやセンサーで発見できている周囲のクルマやトラック、バイクをディスプレイに表示することは、市販されている自動運転機能の付いているクルマに既に装備されています。
今後、自動運転システムの技術が進化してドライバーとクルマの役割が変化してくると、ハンドルやペダルに置き換わる装置が搭載されるかもしれません。例えば、飛行機などで使われているジョイスティックのような装置が使われる可能性もあります。

ジョイスティックであれば、走る(加速する)、止まる(減速する)、曲がるを一つの装置で実現することができます。自動運転システムによるクルマのコントロールとジョイスティックの動きを一緒に動かすことで、ドライバーはジョイスティックに手を置いていると、自動運転システムがどのように車をコントロールしているのかを手の感覚(触覚)から知ることができます。このような触覚を使って自動運転システムによる制御を体感できると、自動運転システムに対する信頼感が高まることが、これまでの研究で明らかになっています。
将来の自動運転では、ジョイスティックに手を置いてクルマの動きを知りつつ、同時に、映画や本を車内のディスプレイで見るというスタイルになるかもしれません。
もっと詳しく知りたい方へ
将来の自動運転についてもっと詳しく知りたい方は 産総研マガジンの記事「CASEとは?―自動車業界から変わる未来のモビリティ―」や「自動運転から手動への安全な交代 寝ていたらどうなる?CASEと人間の行動」にも詳しい内容があります。こちらもぜひご覧ください。