富士通株式会社【代表取締役社長 秋草 直之】(以下「富士通」という)と、綜合警備保障株式会社【代表取締役社長 村井 温】(以下「綜合警備保障」という)は共同で、二足歩行人間型ロボットの応用例として、携帯情報端末(PDA)とインターネットを介して外出先からロボットに留守宅の管理作業を行わせる技術を開発した。
管理作業は、以下の手順で行う。まず、トラッキングビジョンを用いたロボット搭載カメラ映像の画像処理により移動時の目標となる室内の物体をロボットに教示し、作業場所と、そこでの作業項目を登録する。次に、ロボットを作業待機状態に置き、PDAからPHS回線でWebサーバに接続し、Webブラウザで作業場所と作業項目を選択して実行を開始する。この後、ロボットは全て自律的に動作し、現在位置から指定された作業場所へ順次移動し指定された作業を実行する。作業項目は、状況確認・スイッチON/OFF・窓鍵開閉*・ドア開閉**等である。各作業の終了後に、ユーザがブラウザ上で確認するための作業結果画像を撮影する。
共同開発では、富士通がロボット教示システム・PDAのGUI・Webサーバ連携部分の開発を担当し、綜合警備保障がミニマムコックピットの改造・作業時の腕の力制御・作業時にロボットが使用するツールの開発を担当している。
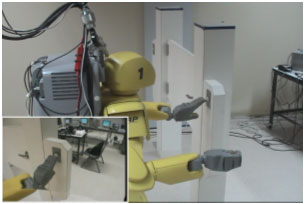
今回は、HRP-1を用い、実験場内に構築した室内環境モデルにおいて、ロボットに作業場所を教示し、PDAを介してロボットを移動・作業させ、作業結果画像をPDA上に表示する一連の作業のデモを行った【下図参照】。
|
|
【教示画面】
|
|
【作業指示画面】
|
|
 |
【スイッチ操作画面】
|
* 今後追加
** 今後追加
作業項目の追加、より使い易いユーザインタフェースの追求、計算速度の高速化等を目指し、引き続き開発を進める。最終的には、2003年3月末に「ビル・ホーム管理サービス応用」の全ての研究開発を完了する予定である。